Yong Hae Heo, Seok Hun Lee, In Kwon Lee, Sang-Youn Kim
{"title":"基于碳酸丙烯酯介电弹性体的增强型柔性振动触觉致动器","authors":"Yong Hae Heo, Seok Hun Lee, In Kwon Lee, Sang-Youn Kim","doi":"10.1007/s11370-023-00503-4","DOIUrl":null,"url":null,"abstract":"<p>This paper proposes a flexible vibrotactile actuator based on a dielectric elastomer which is fabricated by mixing a PDMS-Ecoflex elastomer and PC (propylene carbonate) solution. The proposed flexible vibrotactile actuator is composed of a top electrode, an adhesive tape, the PDMS-Ecoflex-PC-based elastomer, and a bottom electrode. The applied electric field between two parallel electrodes (top and bottom electrodes) creates an electrostatic force in the actuator, resulting in the actuator being compressed. The performance of the vibrotactile actuator based on dielectric elastomers is affected by the mechanical and dielectric properties of the dielectric elastomer. So, in this paper, we experimentally optimize the design of the haptic actuator and then quantitatively evaluate the actuator. For evaluation, the six samples of PDMS-Ecoflex-PC elastomers having different mixing ratios are prepared and their material properties are investigated by experiments. We fabricate the haptic actuators based on PDMS-Ecoflex-PC elastomers and then measure the haptic behaviors of the proposed actuator as a function of the applied voltage amplitude and frequency. Furthermore, we inquire the response time of the proposed actuator. Maximum vibrational force of the optimized sample is about 0.556 N at 140 Hz which is strong enough to stimulate human finger, and the response time is 21 ms which is fast enough to obtain the touch feedback in real time. From the results, we show that the proposed vibrotactile actuator creates a variety of haptic sensations in real time.</p>","PeriodicalId":48813,"journal":{"name":"Intelligent Service Robotics","volume":"22 1","pages":""},"PeriodicalIF":4.3000,"publicationDate":"2024-01-06","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Enhanced flexible vibrotactile actuator based on dielectric elastomer with propylene carbonate\",\"authors\":\"Yong Hae Heo, Seok Hun Lee, In Kwon Lee, Sang-Youn Kim\",\"doi\":\"10.1007/s11370-023-00503-4\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>This paper proposes a flexible vibrotactile actuator based on a dielectric elastomer which is fabricated by mixing a PDMS-Ecoflex elastomer and PC (propylene carbonate) solution. The proposed flexible vibrotactile actuator is composed of a top electrode, an adhesive tape, the PDMS-Ecoflex-PC-based elastomer, and a bottom electrode. The applied electric field between two parallel electrodes (top and bottom electrodes) creates an electrostatic force in the actuator, resulting in the actuator being compressed. The performance of the vibrotactile actuator based on dielectric elastomers is affected by the mechanical and dielectric properties of the dielectric elastomer. So, in this paper, we experimentally optimize the design of the haptic actuator and then quantitatively evaluate the actuator. For evaluation, the six samples of PDMS-Ecoflex-PC elastomers having different mixing ratios are prepared and their material properties are investigated by experiments. We fabricate the haptic actuators based on PDMS-Ecoflex-PC elastomers and then measure the haptic behaviors of the proposed actuator as a function of the applied voltage amplitude and frequency. Furthermore, we inquire the response time of the proposed actuator. Maximum vibrational force of the optimized sample is about 0.556 N at 140 Hz which is strong enough to stimulate human finger, and the response time is 21 ms which is fast enough to obtain the touch feedback in real time. From the results, we show that the proposed vibrotactile actuator creates a variety of haptic sensations in real time.</p>\",\"PeriodicalId\":48813,\"journal\":{\"name\":\"Intelligent Service Robotics\",\"volume\":\"22 1\",\"pages\":\"\"},\"PeriodicalIF\":4.3000,\"publicationDate\":\"2024-01-06\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Intelligent Service Robotics\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.1007/s11370-023-00503-4\",\"RegionNum\":4,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"ROBOTICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Intelligent Service Robotics","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1007/s11370-023-00503-4","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"ROBOTICS","Score":null,"Total":0}
Enhanced flexible vibrotactile actuator based on dielectric elastomer with propylene carbonate
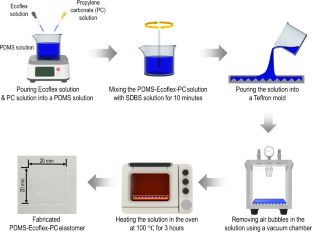
This paper proposes a flexible vibrotactile actuator based on a dielectric elastomer which is fabricated by mixing a PDMS-Ecoflex elastomer and PC (propylene carbonate) solution. The proposed flexible vibrotactile actuator is composed of a top electrode, an adhesive tape, the PDMS-Ecoflex-PC-based elastomer, and a bottom electrode. The applied electric field between two parallel electrodes (top and bottom electrodes) creates an electrostatic force in the actuator, resulting in the actuator being compressed. The performance of the vibrotactile actuator based on dielectric elastomers is affected by the mechanical and dielectric properties of the dielectric elastomer. So, in this paper, we experimentally optimize the design of the haptic actuator and then quantitatively evaluate the actuator. For evaluation, the six samples of PDMS-Ecoflex-PC elastomers having different mixing ratios are prepared and their material properties are investigated by experiments. We fabricate the haptic actuators based on PDMS-Ecoflex-PC elastomers and then measure the haptic behaviors of the proposed actuator as a function of the applied voltage amplitude and frequency. Furthermore, we inquire the response time of the proposed actuator. Maximum vibrational force of the optimized sample is about 0.556 N at 140 Hz which is strong enough to stimulate human finger, and the response time is 21 ms which is fast enough to obtain the touch feedback in real time. From the results, we show that the proposed vibrotactile actuator creates a variety of haptic sensations in real time.
期刊介绍:
The journal directs special attention to the emerging significance of integrating robotics with information technology and cognitive science (such as ubiquitous and adaptive computing,information integration in a distributed environment, and cognitive modelling for human-robot interaction), which spurs innovation toward a new multi-dimensional robotic service to humans. The journal intends to capture and archive this emerging yet significant advancement in the field of intelligent service robotics. The journal will publish original papers of innovative ideas and concepts, new discoveries and improvements, as well as novel applications and business models which are related to the field of intelligent service robotics described above and are proven to be of high quality. The areas that the Journal will cover include, but are not limited to: Intelligent robots serving humans in daily life or in a hazardous environment, such as home or personal service robots, entertainment robots, education robots, medical robots, healthcare and rehabilitation robots, and rescue robots (Service Robotics); Intelligent robotic functions in the form of embedded systems for applications to, for example, intelligent space, intelligent vehicles and transportation systems, intelligent manufacturing systems, and intelligent medical facilities (Embedded Robotics); The integration of robotics with network technologies, generating such services and solutions as distributed robots, distance robotic education-aides, and virtual laboratories or museums (Networked Robotics).

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


