{"title":"从焦距堆栈中获取深度,利用离焦模型实现相机设置不变性","authors":"Yuki Fujimura, Masaaki Iiyama, Takuya Funatomi, Yasuhiro Mukaigawa","doi":"10.1007/s11263-023-01964-x","DOIUrl":null,"url":null,"abstract":"<p>We propose deep depth from focal stack (DDFS), which takes a focal stack as input of a neural network for estimating scene depth. Defocus blur is a useful cue for depth estimation. However, the size of the blur depends on not only scene depth but also camera settings such as focus distance, focal length, and f-number. Current learning-based methods without any defocus models cannot estimate a correct depth map if camera settings are different at training and test times. Our method takes a plane sweep volume as input for the constraint between scene depth, defocus images, and camera settings, and this intermediate representation enables depth estimation with different camera settings at training and test times. This camera-setting invariance can enhance the applicability of DDFS. The experimental results also indicate that our method is robust against a synthetic-to-real domain gap.</p>","PeriodicalId":13752,"journal":{"name":"International Journal of Computer Vision","volume":"10 1","pages":""},"PeriodicalIF":11.6000,"publicationDate":"2023-12-27","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Deep Depth from Focal Stack with Defocus Model for Camera-Setting Invariance\",\"authors\":\"Yuki Fujimura, Masaaki Iiyama, Takuya Funatomi, Yasuhiro Mukaigawa\",\"doi\":\"10.1007/s11263-023-01964-x\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>We propose deep depth from focal stack (DDFS), which takes a focal stack as input of a neural network for estimating scene depth. Defocus blur is a useful cue for depth estimation. However, the size of the blur depends on not only scene depth but also camera settings such as focus distance, focal length, and f-number. Current learning-based methods without any defocus models cannot estimate a correct depth map if camera settings are different at training and test times. Our method takes a plane sweep volume as input for the constraint between scene depth, defocus images, and camera settings, and this intermediate representation enables depth estimation with different camera settings at training and test times. This camera-setting invariance can enhance the applicability of DDFS. The experimental results also indicate that our method is robust against a synthetic-to-real domain gap.</p>\",\"PeriodicalId\":13752,\"journal\":{\"name\":\"International Journal of Computer Vision\",\"volume\":\"10 1\",\"pages\":\"\"},\"PeriodicalIF\":11.6000,\"publicationDate\":\"2023-12-27\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"International Journal of Computer Vision\",\"FirstCategoryId\":\"94\",\"ListUrlMain\":\"https://doi.org/10.1007/s11263-023-01964-x\",\"RegionNum\":2,\"RegionCategory\":\"计算机科学\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q1\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Computer Vision","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1007/s11263-023-01964-x","RegionNum":2,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Deep Depth from Focal Stack with Defocus Model for Camera-Setting Invariance
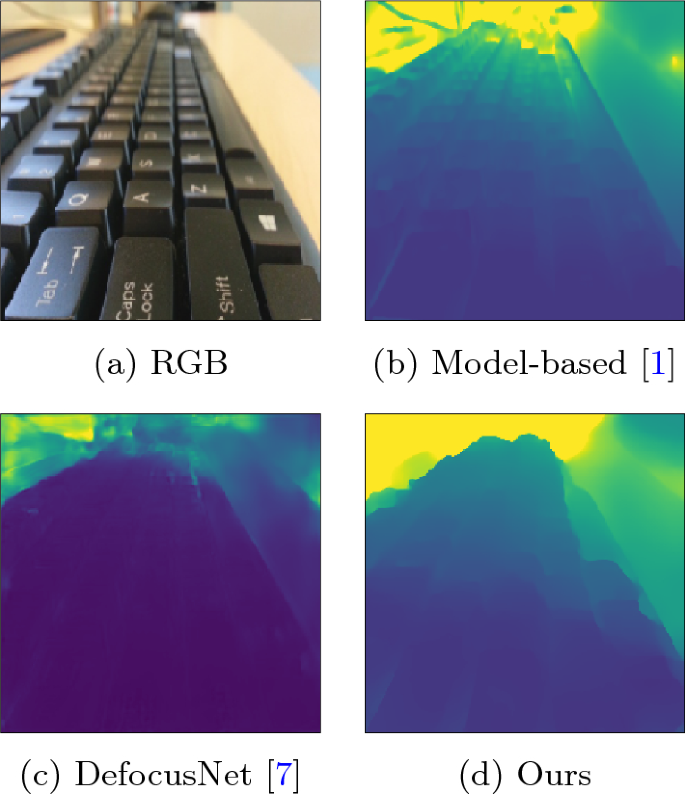
We propose deep depth from focal stack (DDFS), which takes a focal stack as input of a neural network for estimating scene depth. Defocus blur is a useful cue for depth estimation. However, the size of the blur depends on not only scene depth but also camera settings such as focus distance, focal length, and f-number. Current learning-based methods without any defocus models cannot estimate a correct depth map if camera settings are different at training and test times. Our method takes a plane sweep volume as input for the constraint between scene depth, defocus images, and camera settings, and this intermediate representation enables depth estimation with different camera settings at training and test times. This camera-setting invariance can enhance the applicability of DDFS. The experimental results also indicate that our method is robust against a synthetic-to-real domain gap.
期刊介绍:
The International Journal of Computer Vision (IJCV) serves as a platform for sharing new research findings in the rapidly growing field of computer vision. It publishes 12 issues annually and presents high-quality, original contributions to the science and engineering of computer vision. The journal encompasses various types of articles to cater to different research outputs.
Regular articles, which span up to 25 journal pages, focus on significant technical advancements that are of broad interest to the field. These articles showcase substantial progress in computer vision.
Short articles, limited to 10 pages, offer a swift publication path for novel research outcomes. They provide a quicker means for sharing new findings with the computer vision community.
Survey articles, comprising up to 30 pages, offer critical evaluations of the current state of the art in computer vision or offer tutorial presentations of relevant topics. These articles provide comprehensive and insightful overviews of specific subject areas.
In addition to technical articles, the journal also includes book reviews, position papers, and editorials by prominent scientific figures. These contributions serve to complement the technical content and provide valuable perspectives.
The journal encourages authors to include supplementary material online, such as images, video sequences, data sets, and software. This additional material enhances the understanding and reproducibility of the published research.
Overall, the International Journal of Computer Vision is a comprehensive publication that caters to researchers in this rapidly growing field. It covers a range of article types, offers additional online resources, and facilitates the dissemination of impactful research.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


