Ryan C. Dunn, Anugrah Jo Joshy, Jui-Te Lin, Cédric Girerd, Tania K. Morimoto, John T. Hwang
{"title":"基于梯度优化的几何无干扰约束的可扩展执行","authors":"Ryan C. Dunn, Anugrah Jo Joshy, Jui-Te Lin, Cédric Girerd, Tania K. Morimoto, John T. Hwang","doi":"10.1007/s11081-023-09864-2","DOIUrl":null,"url":null,"abstract":"<p>Many design optimization problems include constraints to prevent intersection of the geometric shape being optimized with other objects or with domain boundaries. When applying gradient-based optimization to such problems, the constraint function must provide an accurate representation of the domain boundary and be smooth, amenable to numerical differentiation, and fast-to-evaluate for a large number of points. We propose the use of tensor-product B-splines to construct an efficient-to-evaluate level set function that locally approximates the signed distance function for representing geometric non-interference constraints. Adapting ideas from the surface reconstruction methods, we formulate an energy minimization problem to compute the B-spline control points that define the level set function given an oriented point cloud sampled over a geometric shape. Unlike previous explicit non-interference constraint formulations, our method requires an initial setup operation, but results in a more efficient-to-evaluate and scalable representation of geometric non-interference constraints. This paper presents the results of accuracy and scaling studies performed on our formulation. We demonstrate our method by solving a medical robot design optimization problem with non-interference constraints. We achieve constraint evaluation times on the order of <span>\\(10^{-6}\\)</span> seconds per point on a modern desktop workstation, and a maximum on-surface error of less than 1.0% of the minimum bounding box diagonal for all examples studied. Overall, our method provides an effective formulation for non-interference constraint enforcement with high computational efficiency for gradient-based design optimization problems whose solutions require at least hundreds of evaluations of constraints and their derivatives.</p>","PeriodicalId":56141,"journal":{"name":"Optimization and Engineering","volume":"114 1","pages":""},"PeriodicalIF":2.0000,"publicationDate":"2023-12-28","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Scalable enforcement of geometric non-interference constraints for gradient-based optimization\",\"authors\":\"Ryan C. Dunn, Anugrah Jo Joshy, Jui-Te Lin, Cédric Girerd, Tania K. Morimoto, John T. Hwang\",\"doi\":\"10.1007/s11081-023-09864-2\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Many design optimization problems include constraints to prevent intersection of the geometric shape being optimized with other objects or with domain boundaries. When applying gradient-based optimization to such problems, the constraint function must provide an accurate representation of the domain boundary and be smooth, amenable to numerical differentiation, and fast-to-evaluate for a large number of points. We propose the use of tensor-product B-splines to construct an efficient-to-evaluate level set function that locally approximates the signed distance function for representing geometric non-interference constraints. Adapting ideas from the surface reconstruction methods, we formulate an energy minimization problem to compute the B-spline control points that define the level set function given an oriented point cloud sampled over a geometric shape. Unlike previous explicit non-interference constraint formulations, our method requires an initial setup operation, but results in a more efficient-to-evaluate and scalable representation of geometric non-interference constraints. This paper presents the results of accuracy and scaling studies performed on our formulation. We demonstrate our method by solving a medical robot design optimization problem with non-interference constraints. We achieve constraint evaluation times on the order of <span>\\\\(10^{-6}\\\\)</span> seconds per point on a modern desktop workstation, and a maximum on-surface error of less than 1.0% of the minimum bounding box diagonal for all examples studied. Overall, our method provides an effective formulation for non-interference constraint enforcement with high computational efficiency for gradient-based design optimization problems whose solutions require at least hundreds of evaluations of constraints and their derivatives.</p>\",\"PeriodicalId\":56141,\"journal\":{\"name\":\"Optimization and Engineering\",\"volume\":\"114 1\",\"pages\":\"\"},\"PeriodicalIF\":2.0000,\"publicationDate\":\"2023-12-28\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Optimization and Engineering\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://doi.org/10.1007/s11081-023-09864-2\",\"RegionNum\":3,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"ENGINEERING, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Optimization and Engineering","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1007/s11081-023-09864-2","RegionNum":3,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 0
摘要
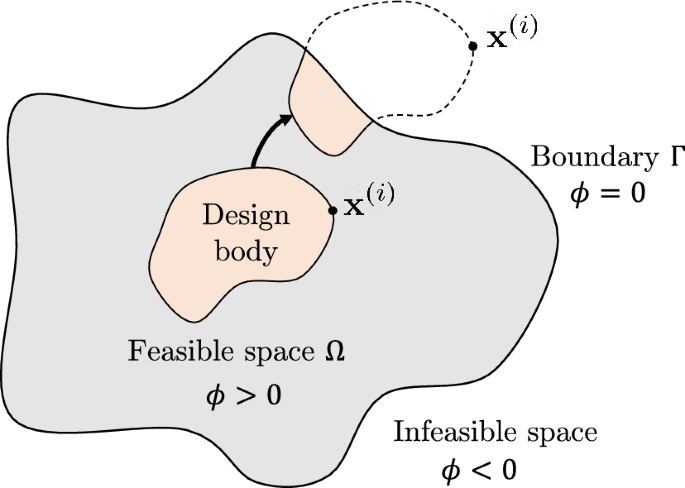
许多设计优化问题都包含一些约束条件,以防止被优化的几何形状与其他物体或域边界相交。在对这类问题进行基于梯度的优化时,约束函数必须能准确地表示域边界,而且要平滑、便于数值微分,并能对大量点进行快速评估。我们建议使用张量乘积 B-样条函数来构建一个可高效评估的水平集函数,该函数局部近似于表示几何非干涉约束的符号距离函数。根据曲面重构方法的思路,我们提出了一个能量最小化问题,以计算在几何形状上采样的定向点云中定义水平集函数的 B 样条控制点。与以往的显式非干涉约束表述不同,我们的方法需要进行初始设置操作,但却能更有效地评估几何非干涉约束,并使其具有可扩展性。本文介绍了对我们的表述进行的精度和扩展性研究的结果。我们通过解决一个带有无干扰约束的医疗机器人设计优化问题来演示我们的方法。在现代台式工作站上,我们实现了每点大约(10^{-6})秒的约束评估时间,并且在所有研究实例中,最大表面误差小于最小边界框对角线的 1.0%。总之,我们的方法为基于梯度的设计优化问题提供了一种有效的无干涉约束执行公式,具有很高的计算效率,这些问题的解决方案至少需要对约束及其导数进行数百次评估。
Scalable enforcement of geometric non-interference constraints for gradient-based optimization
Many design optimization problems include constraints to prevent intersection of the geometric shape being optimized with other objects or with domain boundaries. When applying gradient-based optimization to such problems, the constraint function must provide an accurate representation of the domain boundary and be smooth, amenable to numerical differentiation, and fast-to-evaluate for a large number of points. We propose the use of tensor-product B-splines to construct an efficient-to-evaluate level set function that locally approximates the signed distance function for representing geometric non-interference constraints. Adapting ideas from the surface reconstruction methods, we formulate an energy minimization problem to compute the B-spline control points that define the level set function given an oriented point cloud sampled over a geometric shape. Unlike previous explicit non-interference constraint formulations, our method requires an initial setup operation, but results in a more efficient-to-evaluate and scalable representation of geometric non-interference constraints. This paper presents the results of accuracy and scaling studies performed on our formulation. We demonstrate our method by solving a medical robot design optimization problem with non-interference constraints. We achieve constraint evaluation times on the order of \(10^{-6}\) seconds per point on a modern desktop workstation, and a maximum on-surface error of less than 1.0% of the minimum bounding box diagonal for all examples studied. Overall, our method provides an effective formulation for non-interference constraint enforcement with high computational efficiency for gradient-based design optimization problems whose solutions require at least hundreds of evaluations of constraints and their derivatives.
期刊介绍:
Optimization and Engineering is a multidisciplinary journal; its primary goal is to promote the application of optimization methods in the general area of engineering sciences. We expect submissions to OPTE not only to make a significant optimization contribution but also to impact a specific engineering application.
Topics of Interest:
-Optimization: All methods and algorithms of mathematical optimization, including blackbox and derivative-free optimization, continuous optimization, discrete optimization, global optimization, linear and conic optimization, multiobjective optimization, PDE-constrained optimization & control, and stochastic optimization. Numerical and implementation issues, optimization software, benchmarking, and case studies.
-Engineering Sciences: Aerospace engineering, biomedical engineering, chemical & process engineering, civil, environmental, & architectural engineering, electrical engineering, financial engineering, geosciences, healthcare engineering, industrial & systems engineering, mechanical engineering & MDO, and robotics.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


