{"title":"考虑最佳路径和变道时间点的可靠变道分层控制策略","authors":"Jiayu Fan, Yinxiao Zhan, Jun Liang","doi":"10.1049/itr2.12460","DOIUrl":null,"url":null,"abstract":"<p>Implementing reliable lane changes is crucial for reducing collisions and enhancing traffic safety. However, existing research lacks comprehensive investigation into the optimal path for maintaining driving quality, and little attention has been given to determining the appropriate lane changing time point. This paper addresses these gaps by presenting a novel hierarchical strategy. First, a synthesized safety distance for lane changing, which considers variable execution duration, is designed to reduce collision risk. Next, a hierarchy of optimization control strategies is proposed to obtain the optimal path. An upper neural network-fuzzy control algorithm is established to identify an appropriate lane-changing time point. Additionally, a lower neural network-improved firefly algorithm is formulated to optimize the preliminary safety path based on multiple driving criteria. Furthermore, the dynamics characteristics of the vehicle are incorporated into the model predictive control algorithm to ensure the vehicle follows the optimal path. Finally, the feasibility of the proposed hierarchical control strategy is validated through typical lane-changing scenarios conducted on the Carsim–Simulink platform.</p>","PeriodicalId":50381,"journal":{"name":"IET Intelligent Transport Systems","volume":"18 4","pages":"657-671"},"PeriodicalIF":2.3000,"publicationDate":"2023-12-13","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/itr2.12460","citationCount":"0","resultStr":"{\"title\":\"A hierarchical control strategy for reliable lane changes considering optimal path and lane-changing time point\",\"authors\":\"Jiayu Fan, Yinxiao Zhan, Jun Liang\",\"doi\":\"10.1049/itr2.12460\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Implementing reliable lane changes is crucial for reducing collisions and enhancing traffic safety. However, existing research lacks comprehensive investigation into the optimal path for maintaining driving quality, and little attention has been given to determining the appropriate lane changing time point. This paper addresses these gaps by presenting a novel hierarchical strategy. First, a synthesized safety distance for lane changing, which considers variable execution duration, is designed to reduce collision risk. Next, a hierarchy of optimization control strategies is proposed to obtain the optimal path. An upper neural network-fuzzy control algorithm is established to identify an appropriate lane-changing time point. Additionally, a lower neural network-improved firefly algorithm is formulated to optimize the preliminary safety path based on multiple driving criteria. Furthermore, the dynamics characteristics of the vehicle are incorporated into the model predictive control algorithm to ensure the vehicle follows the optimal path. Finally, the feasibility of the proposed hierarchical control strategy is validated through typical lane-changing scenarios conducted on the Carsim–Simulink platform.</p>\",\"PeriodicalId\":50381,\"journal\":{\"name\":\"IET Intelligent Transport Systems\",\"volume\":\"18 4\",\"pages\":\"657-671\"},\"PeriodicalIF\":2.3000,\"publicationDate\":\"2023-12-13\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1049/itr2.12460\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"IET Intelligent Transport Systems\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1049/itr2.12460\",\"RegionNum\":4,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"IET Intelligent Transport Systems","FirstCategoryId":"5","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1049/itr2.12460","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
A hierarchical control strategy for reliable lane changes considering optimal path and lane-changing time point
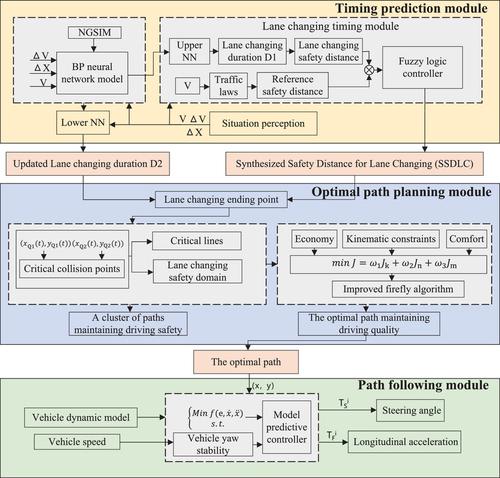
Implementing reliable lane changes is crucial for reducing collisions and enhancing traffic safety. However, existing research lacks comprehensive investigation into the optimal path for maintaining driving quality, and little attention has been given to determining the appropriate lane changing time point. This paper addresses these gaps by presenting a novel hierarchical strategy. First, a synthesized safety distance for lane changing, which considers variable execution duration, is designed to reduce collision risk. Next, a hierarchy of optimization control strategies is proposed to obtain the optimal path. An upper neural network-fuzzy control algorithm is established to identify an appropriate lane-changing time point. Additionally, a lower neural network-improved firefly algorithm is formulated to optimize the preliminary safety path based on multiple driving criteria. Furthermore, the dynamics characteristics of the vehicle are incorporated into the model predictive control algorithm to ensure the vehicle follows the optimal path. Finally, the feasibility of the proposed hierarchical control strategy is validated through typical lane-changing scenarios conducted on the Carsim–Simulink platform.
期刊介绍:
IET Intelligent Transport Systems is an interdisciplinary journal devoted to research into the practical applications of ITS and infrastructures. The scope of the journal includes the following:
Sustainable traffic solutions
Deployments with enabling technologies
Pervasive monitoring
Applications; demonstrations and evaluation
Economic and behavioural analyses of ITS services and scenario
Data Integration and analytics
Information collection and processing; image processing applications in ITS
ITS aspects of electric vehicles
Autonomous vehicles; connected vehicle systems;
In-vehicle ITS, safety and vulnerable road user aspects
Mobility as a service systems
Traffic management and control
Public transport systems technologies
Fleet and public transport logistics
Emergency and incident management
Demand management and electronic payment systems
Traffic related air pollution management
Policy and institutional issues
Interoperability, standards and architectures
Funding scenarios
Enforcement
Human machine interaction
Education, training and outreach
Current Special Issue Call for papers:
Intelligent Transportation Systems in Smart Cities for Sustainable Environment - https://digital-library.theiet.org/files/IET_ITS_CFP_ITSSCSE.pdf
Sustainably Intelligent Mobility (SIM) - https://digital-library.theiet.org/files/IET_ITS_CFP_SIM.pdf
Traffic Theory and Modelling in the Era of Artificial Intelligence and Big Data (in collaboration with World Congress for Transport Research, WCTR 2019) - https://digital-library.theiet.org/files/IET_ITS_CFP_WCTR.pdf

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


