{"title":"带再生制动功能的电动汽车排队行驶的能效优化与控制","authors":"Zhicheng Li, Yang Wang","doi":"10.1049/itr2.12445","DOIUrl":null,"url":null,"abstract":"<p>It is a critical problem to improve energy efficiency for electric vehicle platooning systems. Moreover, different from internal combustion engine vehicles, the electric engine has higher efficiency, and further regenerating braking is widely used to recycle part of the energy in the electric vehicle when it is braking. What is more, if vehicles take a formation to drive, they can save more energy. Combining all the favorable factors, this paper presents a two-layer energy-efficiency optimization strategy for electric vehicle platooning. The upper layer presents an optimization method to find the optimal velocities and distances between vehicles under different road conditions during the cruise status of the electric vehicle platooning. Due to the nonconvex cost function and considering regenerative braking, the optimization problem is addressed by the dynamic programming method combined with the successive convex approximation method. Further, the lower layer presents a real-time Model Predictive Control (MPC) strategy, and it directly introduces the battery pack state of charge consumption as the input, which not only finishes the control mission but also consumes minimal energy. Finally, simulation results are provided to verify the effectiveness and advantages of the proposed methods.</p>","PeriodicalId":50381,"journal":{"name":"IET Intelligent Transport Systems","volume":"18 2","pages":"203-217"},"PeriodicalIF":2.3000,"publicationDate":"2023-12-08","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/itr2.12445","citationCount":"0","resultStr":"{\"title\":\"Energy-efficiency optimization and control for electric vehicle platooning with regenerating braking\",\"authors\":\"Zhicheng Li, Yang Wang\",\"doi\":\"10.1049/itr2.12445\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>It is a critical problem to improve energy efficiency for electric vehicle platooning systems. Moreover, different from internal combustion engine vehicles, the electric engine has higher efficiency, and further regenerating braking is widely used to recycle part of the energy in the electric vehicle when it is braking. What is more, if vehicles take a formation to drive, they can save more energy. Combining all the favorable factors, this paper presents a two-layer energy-efficiency optimization strategy for electric vehicle platooning. The upper layer presents an optimization method to find the optimal velocities and distances between vehicles under different road conditions during the cruise status of the electric vehicle platooning. Due to the nonconvex cost function and considering regenerative braking, the optimization problem is addressed by the dynamic programming method combined with the successive convex approximation method. Further, the lower layer presents a real-time Model Predictive Control (MPC) strategy, and it directly introduces the battery pack state of charge consumption as the input, which not only finishes the control mission but also consumes minimal energy. Finally, simulation results are provided to verify the effectiveness and advantages of the proposed methods.</p>\",\"PeriodicalId\":50381,\"journal\":{\"name\":\"IET Intelligent Transport Systems\",\"volume\":\"18 2\",\"pages\":\"203-217\"},\"PeriodicalIF\":2.3000,\"publicationDate\":\"2023-12-08\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1049/itr2.12445\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"IET Intelligent Transport Systems\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1049/itr2.12445\",\"RegionNum\":4,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"IET Intelligent Transport Systems","FirstCategoryId":"5","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1049/itr2.12445","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
Energy-efficiency optimization and control for electric vehicle platooning with regenerating braking
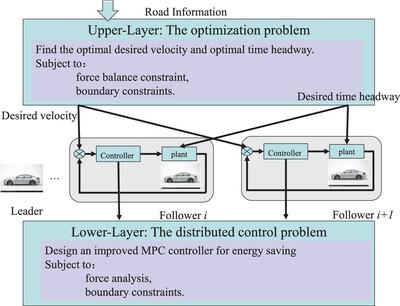
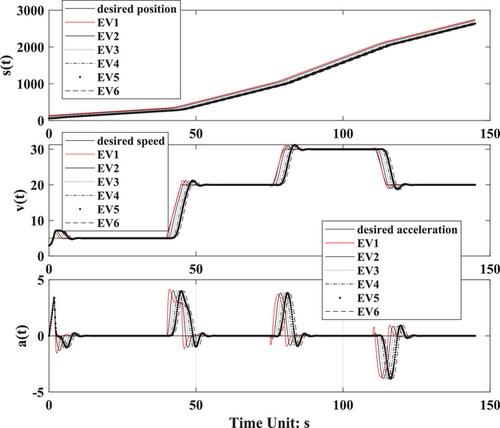
It is a critical problem to improve energy efficiency for electric vehicle platooning systems. Moreover, different from internal combustion engine vehicles, the electric engine has higher efficiency, and further regenerating braking is widely used to recycle part of the energy in the electric vehicle when it is braking. What is more, if vehicles take a formation to drive, they can save more energy. Combining all the favorable factors, this paper presents a two-layer energy-efficiency optimization strategy for electric vehicle platooning. The upper layer presents an optimization method to find the optimal velocities and distances between vehicles under different road conditions during the cruise status of the electric vehicle platooning. Due to the nonconvex cost function and considering regenerative braking, the optimization problem is addressed by the dynamic programming method combined with the successive convex approximation method. Further, the lower layer presents a real-time Model Predictive Control (MPC) strategy, and it directly introduces the battery pack state of charge consumption as the input, which not only finishes the control mission but also consumes minimal energy. Finally, simulation results are provided to verify the effectiveness and advantages of the proposed methods.
期刊介绍:
IET Intelligent Transport Systems is an interdisciplinary journal devoted to research into the practical applications of ITS and infrastructures. The scope of the journal includes the following:
Sustainable traffic solutions
Deployments with enabling technologies
Pervasive monitoring
Applications; demonstrations and evaluation
Economic and behavioural analyses of ITS services and scenario
Data Integration and analytics
Information collection and processing; image processing applications in ITS
ITS aspects of electric vehicles
Autonomous vehicles; connected vehicle systems;
In-vehicle ITS, safety and vulnerable road user aspects
Mobility as a service systems
Traffic management and control
Public transport systems technologies
Fleet and public transport logistics
Emergency and incident management
Demand management and electronic payment systems
Traffic related air pollution management
Policy and institutional issues
Interoperability, standards and architectures
Funding scenarios
Enforcement
Human machine interaction
Education, training and outreach
Current Special Issue Call for papers:
Intelligent Transportation Systems in Smart Cities for Sustainable Environment - https://digital-library.theiet.org/files/IET_ITS_CFP_ITSSCSE.pdf
Sustainably Intelligent Mobility (SIM) - https://digital-library.theiet.org/files/IET_ITS_CFP_SIM.pdf
Traffic Theory and Modelling in the Era of Artificial Intelligence and Big Data (in collaboration with World Congress for Transport Research, WCTR 2019) - https://digital-library.theiet.org/files/IET_ITS_CFP_WCTR.pdf

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


