{"title":"车辆排二维运动的分布式非线性模型预测控制与高斯过程动力学","authors":"Xiaorong Hu, Yao Shi, Lei Xie, Hongye Su","doi":"10.1049/itr2.12418","DOIUrl":null,"url":null,"abstract":"<p>The platoon control of connected and automated vehicles is an important topic in transportation research. The characteristics of non-linearities, external disturbances, and strong coupling are non-negligible in two-dimensional motion control. An integrated longitudinal and lateral vehicle dynamics is required. A Gaussian Process-based Distributed Stochastic Model Predictive Control (GP-DSMPC) for two-dimensional motion is proposed. It achieves global longitudinal stability and lateral error suppression. Gaussian process (GP) regression is employed to approximate the unknown model error. For the two-norm chance constraints, over-approximating the confidence ellipse to an outer polyhedron is an effective way to reduce the conservativeness and coupling effect in longitudinal and lateral motion. A neighbour-average target trajectory is designed with an upper-level optimization for adjustable target coefficients. The sum of the local cost functions is used as a Lyapunov candidate to achieve the global stability of the longitudinal motion. Some conditions on penalty weights and target coefficients among subsystems, and terminal outputs are derived. Simulation results reveal that the proposed method is effective for disturbance attenuation and performs better than distributed non-linear model predictive control without GP estimation under low-friction road conditions.</p>","PeriodicalId":50381,"journal":{"name":"IET Intelligent Transport Systems","volume":"18 1","pages":"1-15"},"PeriodicalIF":2.3000,"publicationDate":"2023-12-07","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/itr2.12418","citationCount":"0","resultStr":"{\"title\":\"Distributed non-linear model predictive control with Gaussian process dynamics for two-dimensional motion of vehicle platoon\",\"authors\":\"Xiaorong Hu, Yao Shi, Lei Xie, Hongye Su\",\"doi\":\"10.1049/itr2.12418\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>The platoon control of connected and automated vehicles is an important topic in transportation research. The characteristics of non-linearities, external disturbances, and strong coupling are non-negligible in two-dimensional motion control. An integrated longitudinal and lateral vehicle dynamics is required. A Gaussian Process-based Distributed Stochastic Model Predictive Control (GP-DSMPC) for two-dimensional motion is proposed. It achieves global longitudinal stability and lateral error suppression. Gaussian process (GP) regression is employed to approximate the unknown model error. For the two-norm chance constraints, over-approximating the confidence ellipse to an outer polyhedron is an effective way to reduce the conservativeness and coupling effect in longitudinal and lateral motion. A neighbour-average target trajectory is designed with an upper-level optimization for adjustable target coefficients. The sum of the local cost functions is used as a Lyapunov candidate to achieve the global stability of the longitudinal motion. Some conditions on penalty weights and target coefficients among subsystems, and terminal outputs are derived. Simulation results reveal that the proposed method is effective for disturbance attenuation and performs better than distributed non-linear model predictive control without GP estimation under low-friction road conditions.</p>\",\"PeriodicalId\":50381,\"journal\":{\"name\":\"IET Intelligent Transport Systems\",\"volume\":\"18 1\",\"pages\":\"1-15\"},\"PeriodicalIF\":2.3000,\"publicationDate\":\"2023-12-07\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1049/itr2.12418\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"IET Intelligent Transport Systems\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1049/itr2.12418\",\"RegionNum\":4,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"IET Intelligent Transport Systems","FirstCategoryId":"5","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1049/itr2.12418","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
引用次数: 0
摘要
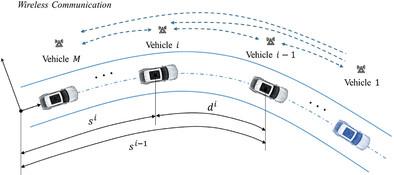
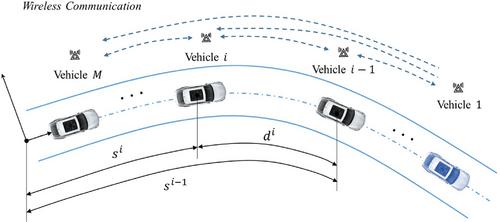
互联和自动驾驶车辆的排布控制是交通研究的一个重要课题。在二维运动控制中,非线性、外部干扰和强耦合等特性不可忽视。因此需要综合车辆纵向和横向动力学。本文提出了一种基于高斯过程的二维运动分布式随机模型预测控制(GP-DSMPC)。它实现了全局纵向稳定性和横向误差抑制。采用高斯过程(GP)回归来近似未知模型误差。对于二规范机会约束,将置信椭圆过度近似为外多面体是减少纵向和横向运动中的保守性和耦合效应的有效方法。通过对可调整的目标系数进行上层优化,设计出邻近平均目标轨迹。局部成本函数之和被用作 Lyapunov 候选函数,以实现纵向运动的全局稳定性。推导出了子系统间惩罚权重和目标系数以及终端输出的一些条件。仿真结果表明,在低摩擦路面条件下,所提方法能有效减弱干扰,其性能优于无 GP 估计的分布式非线性模型预测控制。
Distributed non-linear model predictive control with Gaussian process dynamics for two-dimensional motion of vehicle platoon
The platoon control of connected and automated vehicles is an important topic in transportation research. The characteristics of non-linearities, external disturbances, and strong coupling are non-negligible in two-dimensional motion control. An integrated longitudinal and lateral vehicle dynamics is required. A Gaussian Process-based Distributed Stochastic Model Predictive Control (GP-DSMPC) for two-dimensional motion is proposed. It achieves global longitudinal stability and lateral error suppression. Gaussian process (GP) regression is employed to approximate the unknown model error. For the two-norm chance constraints, over-approximating the confidence ellipse to an outer polyhedron is an effective way to reduce the conservativeness and coupling effect in longitudinal and lateral motion. A neighbour-average target trajectory is designed with an upper-level optimization for adjustable target coefficients. The sum of the local cost functions is used as a Lyapunov candidate to achieve the global stability of the longitudinal motion. Some conditions on penalty weights and target coefficients among subsystems, and terminal outputs are derived. Simulation results reveal that the proposed method is effective for disturbance attenuation and performs better than distributed non-linear model predictive control without GP estimation under low-friction road conditions.
期刊介绍:
IET Intelligent Transport Systems is an interdisciplinary journal devoted to research into the practical applications of ITS and infrastructures. The scope of the journal includes the following:
Sustainable traffic solutions
Deployments with enabling technologies
Pervasive monitoring
Applications; demonstrations and evaluation
Economic and behavioural analyses of ITS services and scenario
Data Integration and analytics
Information collection and processing; image processing applications in ITS
ITS aspects of electric vehicles
Autonomous vehicles; connected vehicle systems;
In-vehicle ITS, safety and vulnerable road user aspects
Mobility as a service systems
Traffic management and control
Public transport systems technologies
Fleet and public transport logistics
Emergency and incident management
Demand management and electronic payment systems
Traffic related air pollution management
Policy and institutional issues
Interoperability, standards and architectures
Funding scenarios
Enforcement
Human machine interaction
Education, training and outreach
Current Special Issue Call for papers:
Intelligent Transportation Systems in Smart Cities for Sustainable Environment - https://digital-library.theiet.org/files/IET_ITS_CFP_ITSSCSE.pdf
Sustainably Intelligent Mobility (SIM) - https://digital-library.theiet.org/files/IET_ITS_CFP_SIM.pdf
Traffic Theory and Modelling in the Era of Artificial Intelligence and Big Data (in collaboration with World Congress for Transport Research, WCTR 2019) - https://digital-library.theiet.org/files/IET_ITS_CFP_WCTR.pdf

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


