Jincao Zhou, Xin Bai, Weiping Fu, Benyu Ning, Rui Li
{"title":"基于数据和知识驱动方法的行人意图估计和轨迹预测","authors":"Jincao Zhou, Xin Bai, Weiping Fu, Benyu Ning, Rui Li","doi":"10.1049/itr2.12453","DOIUrl":null,"url":null,"abstract":"<p>With the development of deep learning technology, the problem of data-driven trajectory prediction and intention recognition has been widely studied. However, the pedestrian trajectory prediction and intention recognition methods based solely on data-driven have weak data description ability and black-box characteristics, which cannot reason about pedestrian crossing intention and predict pedestrian crossing trajectory as humans do. To address the above problems, the authors proposed a data and knowledge-driven pedestrian intention estimation and trajectory prediction method by imitating human cognitive mechanisms. In the pedestrian intention inference process, the authors adopted the knowledge-driven method. As a first step, the authors built a knowledge graph of pedestrian crossing scenes, and then paired it with a Bayesian network to estimate pedestrian crossing intentions. In the pedestrian trajectory prediction process, the authors used a data-driven approach, combining pedestrian crossing trajectory features and knowledge-based pedestrian intentions. Experiments show that all evaluation metrics of pedestrian trajectory prediction were improved after adding pedestrian intentions obtained by knowledge-driven.</p>","PeriodicalId":50381,"journal":{"name":"IET Intelligent Transport Systems","volume":null,"pages":null},"PeriodicalIF":2.3000,"publicationDate":"2023-11-29","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/itr2.12453","citationCount":"0","resultStr":"{\"title\":\"Pedestrian intention estimation and trajectory prediction based on data and knowledge-driven method\",\"authors\":\"Jincao Zhou, Xin Bai, Weiping Fu, Benyu Ning, Rui Li\",\"doi\":\"10.1049/itr2.12453\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>With the development of deep learning technology, the problem of data-driven trajectory prediction and intention recognition has been widely studied. However, the pedestrian trajectory prediction and intention recognition methods based solely on data-driven have weak data description ability and black-box characteristics, which cannot reason about pedestrian crossing intention and predict pedestrian crossing trajectory as humans do. To address the above problems, the authors proposed a data and knowledge-driven pedestrian intention estimation and trajectory prediction method by imitating human cognitive mechanisms. In the pedestrian intention inference process, the authors adopted the knowledge-driven method. As a first step, the authors built a knowledge graph of pedestrian crossing scenes, and then paired it with a Bayesian network to estimate pedestrian crossing intentions. In the pedestrian trajectory prediction process, the authors used a data-driven approach, combining pedestrian crossing trajectory features and knowledge-based pedestrian intentions. Experiments show that all evaluation metrics of pedestrian trajectory prediction were improved after adding pedestrian intentions obtained by knowledge-driven.</p>\",\"PeriodicalId\":50381,\"journal\":{\"name\":\"IET Intelligent Transport Systems\",\"volume\":null,\"pages\":null},\"PeriodicalIF\":2.3000,\"publicationDate\":\"2023-11-29\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://onlinelibrary.wiley.com/doi/epdf/10.1049/itr2.12453\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"IET Intelligent Transport Systems\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1049/itr2.12453\",\"RegionNum\":4,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"ENGINEERING, ELECTRICAL & ELECTRONIC\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"IET Intelligent Transport Systems","FirstCategoryId":"5","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1049/itr2.12453","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, ELECTRICAL & ELECTRONIC","Score":null,"Total":0}
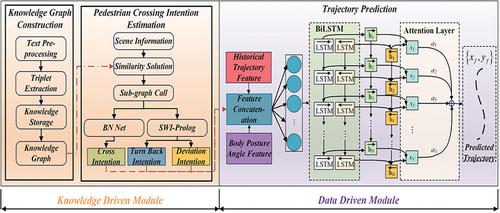
Pedestrian intention estimation and trajectory prediction based on data and knowledge-driven method
With the development of deep learning technology, the problem of data-driven trajectory prediction and intention recognition has been widely studied. However, the pedestrian trajectory prediction and intention recognition methods based solely on data-driven have weak data description ability and black-box characteristics, which cannot reason about pedestrian crossing intention and predict pedestrian crossing trajectory as humans do. To address the above problems, the authors proposed a data and knowledge-driven pedestrian intention estimation and trajectory prediction method by imitating human cognitive mechanisms. In the pedestrian intention inference process, the authors adopted the knowledge-driven method. As a first step, the authors built a knowledge graph of pedestrian crossing scenes, and then paired it with a Bayesian network to estimate pedestrian crossing intentions. In the pedestrian trajectory prediction process, the authors used a data-driven approach, combining pedestrian crossing trajectory features and knowledge-based pedestrian intentions. Experiments show that all evaluation metrics of pedestrian trajectory prediction were improved after adding pedestrian intentions obtained by knowledge-driven.
期刊介绍:
IET Intelligent Transport Systems is an interdisciplinary journal devoted to research into the practical applications of ITS and infrastructures. The scope of the journal includes the following:
Sustainable traffic solutions
Deployments with enabling technologies
Pervasive monitoring
Applications; demonstrations and evaluation
Economic and behavioural analyses of ITS services and scenario
Data Integration and analytics
Information collection and processing; image processing applications in ITS
ITS aspects of electric vehicles
Autonomous vehicles; connected vehicle systems;
In-vehicle ITS, safety and vulnerable road user aspects
Mobility as a service systems
Traffic management and control
Public transport systems technologies
Fleet and public transport logistics
Emergency and incident management
Demand management and electronic payment systems
Traffic related air pollution management
Policy and institutional issues
Interoperability, standards and architectures
Funding scenarios
Enforcement
Human machine interaction
Education, training and outreach
Current Special Issue Call for papers:
Intelligent Transportation Systems in Smart Cities for Sustainable Environment - https://digital-library.theiet.org/files/IET_ITS_CFP_ITSSCSE.pdf
Sustainably Intelligent Mobility (SIM) - https://digital-library.theiet.org/files/IET_ITS_CFP_SIM.pdf
Traffic Theory and Modelling in the Era of Artificial Intelligence and Big Data (in collaboration with World Congress for Transport Research, WCTR 2019) - https://digital-library.theiet.org/files/IET_ITS_CFP_WCTR.pdf


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


