{"title":"SoRoTop:基于设计的气动驱动软机器人拓扑优化MATLAB代码指南","authors":"Prabhat Kumar","doi":"10.1007/s11081-023-09865-1","DOIUrl":null,"url":null,"abstract":"<p>Demands for pneumatic-driven soft robots are constantly rising for various applications. However, they are often designed manually due to the lack of systematic methods. Moreover, design-dependent characteristics of pneumatic actuation pose distinctive challenges. This paper provides a compact MATLAB code, named <span>SoRoTop</span>, and its various extensions for designing pneumatic-driven soft robots using topology optimization. The code uses the method of moving asymptotes as the optimizer and builds upon the approach initially presented in Kumar et al. (Struct Multidiscip Optim 61(4):1637–1655, 2020). The pneumatic load is modeled using Darcy’s law with a conceptualized drainage term. Consistent nodal loads are determined from the resultant pressure field using the conventional finite element approach. The robust formulation is employed, i.e., the eroded and blueprint design descriptions are used. A min–max optimization problem is formulated using the output displacements of the eroded and blueprint designs. A volume constraint is imposed on the blueprint design, while the eroded design is used to apply a conceptualized strain energy constraint. The latter constraint aids in attaining optimized designs that can endure the applied load without compromising their performance. Sensitivities required for optimization are computed using the adjoint-variable method. The code is explained in detail, and various extensions are also presented. It is structured into pre-optimization, MMA optimization, and post-optimization operations, each of which is comprehensively detailed. The paper also illustrates the impact of load sensitivities on the optimized designs. <span>SoRoTop</span> is provided in “Appendix A” and is available with extensions in the supplementary material and publicly at https://github.com/PrabhatIn/SoRoTop.</p>","PeriodicalId":56141,"journal":{"name":"Optimization and Engineering","volume":"16 1","pages":""},"PeriodicalIF":1.7000,"publicationDate":"2023-11-23","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"SoRoTop: a hitchhiker’s guide to topology optimization MATLAB code for design-dependent pneumatic-driven soft robots\",\"authors\":\"Prabhat Kumar\",\"doi\":\"10.1007/s11081-023-09865-1\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Demands for pneumatic-driven soft robots are constantly rising for various applications. However, they are often designed manually due to the lack of systematic methods. Moreover, design-dependent characteristics of pneumatic actuation pose distinctive challenges. This paper provides a compact MATLAB code, named <span>SoRoTop</span>, and its various extensions for designing pneumatic-driven soft robots using topology optimization. The code uses the method of moving asymptotes as the optimizer and builds upon the approach initially presented in Kumar et al. (Struct Multidiscip Optim 61(4):1637–1655, 2020). The pneumatic load is modeled using Darcy’s law with a conceptualized drainage term. Consistent nodal loads are determined from the resultant pressure field using the conventional finite element approach. The robust formulation is employed, i.e., the eroded and blueprint design descriptions are used. A min–max optimization problem is formulated using the output displacements of the eroded and blueprint designs. A volume constraint is imposed on the blueprint design, while the eroded design is used to apply a conceptualized strain energy constraint. The latter constraint aids in attaining optimized designs that can endure the applied load without compromising their performance. Sensitivities required for optimization are computed using the adjoint-variable method. The code is explained in detail, and various extensions are also presented. It is structured into pre-optimization, MMA optimization, and post-optimization operations, each of which is comprehensively detailed. The paper also illustrates the impact of load sensitivities on the optimized designs. <span>SoRoTop</span> is provided in “Appendix A” and is available with extensions in the supplementary material and publicly at https://github.com/PrabhatIn/SoRoTop.</p>\",\"PeriodicalId\":56141,\"journal\":{\"name\":\"Optimization and Engineering\",\"volume\":\"16 1\",\"pages\":\"\"},\"PeriodicalIF\":1.7000,\"publicationDate\":\"2023-11-23\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Optimization and Engineering\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://doi.org/10.1007/s11081-023-09865-1\",\"RegionNum\":3,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q2\",\"JCRName\":\"ENGINEERING, MULTIDISCIPLINARY\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Optimization and Engineering","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1007/s11081-023-09865-1","RegionNum":3,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, MULTIDISCIPLINARY","Score":null,"Total":0}
SoRoTop: a hitchhiker’s guide to topology optimization MATLAB code for design-dependent pneumatic-driven soft robots
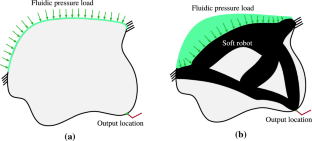
Demands for pneumatic-driven soft robots are constantly rising for various applications. However, they are often designed manually due to the lack of systematic methods. Moreover, design-dependent characteristics of pneumatic actuation pose distinctive challenges. This paper provides a compact MATLAB code, named SoRoTop, and its various extensions for designing pneumatic-driven soft robots using topology optimization. The code uses the method of moving asymptotes as the optimizer and builds upon the approach initially presented in Kumar et al. (Struct Multidiscip Optim 61(4):1637–1655, 2020). The pneumatic load is modeled using Darcy’s law with a conceptualized drainage term. Consistent nodal loads are determined from the resultant pressure field using the conventional finite element approach. The robust formulation is employed, i.e., the eroded and blueprint design descriptions are used. A min–max optimization problem is formulated using the output displacements of the eroded and blueprint designs. A volume constraint is imposed on the blueprint design, while the eroded design is used to apply a conceptualized strain energy constraint. The latter constraint aids in attaining optimized designs that can endure the applied load without compromising their performance. Sensitivities required for optimization are computed using the adjoint-variable method. The code is explained in detail, and various extensions are also presented. It is structured into pre-optimization, MMA optimization, and post-optimization operations, each of which is comprehensively detailed. The paper also illustrates the impact of load sensitivities on the optimized designs. SoRoTop is provided in “Appendix A” and is available with extensions in the supplementary material and publicly at https://github.com/PrabhatIn/SoRoTop.
期刊介绍:
Optimization and Engineering is a multidisciplinary journal; its primary goal is to promote the application of optimization methods in the general area of engineering sciences. We expect submissions to OPTE not only to make a significant optimization contribution but also to impact a specific engineering application.
Topics of Interest:
-Optimization: All methods and algorithms of mathematical optimization, including blackbox and derivative-free optimization, continuous optimization, discrete optimization, global optimization, linear and conic optimization, multiobjective optimization, PDE-constrained optimization & control, and stochastic optimization. Numerical and implementation issues, optimization software, benchmarking, and case studies.
-Engineering Sciences: Aerospace engineering, biomedical engineering, chemical & process engineering, civil, environmental, & architectural engineering, electrical engineering, financial engineering, geosciences, healthcare engineering, industrial & systems engineering, mechanical engineering & MDO, and robotics.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


