{"title":"拉盖尔-高斯模式实验三维超定位","authors":"Chenyu Hu, Liang Xu, Ben Wang, Zhiwen Li, Yipeng Zhang, Yong Zhang, Lijian Zhang","doi":"10.1007/s44214-023-00047-9","DOIUrl":null,"url":null,"abstract":"<p>Improving three-dimensional (3D) localization precision is of paramount importance for super-resolution imaging. By properly engineering the point spread function (PSF), such as utilizing Laguerre–Gaussian (LG) modes and their superposition, the ultimate limits of 3D localization precision can be enhanced. However, achieving these limits is challenging, as it often involves complicated detection strategies and practical limitations. In this work, we rigorously derive the ultimate 3D localization limits of LG modes and their superposition, specifically rotation modes, in the multi-parameter estimation framework. Our findings reveal that a significant portion of the information required for achieving 3D super-localization of LG modes can be obtained through feasible intensity detection. Moreover, the 3D ultimate precision can be achieved when the azimuthal index <i>l</i> is zero. To provide a proof-of-principle demonstration, we develop an iterative maximum likelihood estimation (MLE) algorithm that converges to the 3D position of a point source, considering the pixelation and detector noise. The experimental implementation exhibits an improvement of up to two-fold in lateral localization precision and up to twenty-fold in axial localization precision when using LG modes compared to Gaussian mode. We also showcase the superior axial localization capability of the rotation mode within the near-focus region, effectively overcoming the limitations encountered by single LG modes. Notably, in the presence of realistic aberration, the algorithm robustly achieves the Cramér-Rao lower bound. Our findings provide valuable insights for evaluating and optimizing the achievable 3D localization precision, which will facilitate the advancements in super-resolution microscopy.</p>","PeriodicalId":501227,"journal":{"name":"Quantum Frontiers","volume":"38 4","pages":""},"PeriodicalIF":0.0000,"publicationDate":"2023-11-29","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Experimental 3D super-localization with Laguerre–Gaussian modes\",\"authors\":\"Chenyu Hu, Liang Xu, Ben Wang, Zhiwen Li, Yipeng Zhang, Yong Zhang, Lijian Zhang\",\"doi\":\"10.1007/s44214-023-00047-9\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>Improving three-dimensional (3D) localization precision is of paramount importance for super-resolution imaging. By properly engineering the point spread function (PSF), such as utilizing Laguerre–Gaussian (LG) modes and their superposition, the ultimate limits of 3D localization precision can be enhanced. However, achieving these limits is challenging, as it often involves complicated detection strategies and practical limitations. In this work, we rigorously derive the ultimate 3D localization limits of LG modes and their superposition, specifically rotation modes, in the multi-parameter estimation framework. Our findings reveal that a significant portion of the information required for achieving 3D super-localization of LG modes can be obtained through feasible intensity detection. Moreover, the 3D ultimate precision can be achieved when the azimuthal index <i>l</i> is zero. To provide a proof-of-principle demonstration, we develop an iterative maximum likelihood estimation (MLE) algorithm that converges to the 3D position of a point source, considering the pixelation and detector noise. The experimental implementation exhibits an improvement of up to two-fold in lateral localization precision and up to twenty-fold in axial localization precision when using LG modes compared to Gaussian mode. We also showcase the superior axial localization capability of the rotation mode within the near-focus region, effectively overcoming the limitations encountered by single LG modes. Notably, in the presence of realistic aberration, the algorithm robustly achieves the Cramér-Rao lower bound. Our findings provide valuable insights for evaluating and optimizing the achievable 3D localization precision, which will facilitate the advancements in super-resolution microscopy.</p>\",\"PeriodicalId\":501227,\"journal\":{\"name\":\"Quantum Frontiers\",\"volume\":\"38 4\",\"pages\":\"\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2023-11-29\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Quantum Frontiers\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1007/s44214-023-00047-9\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Quantum Frontiers","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1007/s44214-023-00047-9","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
Experimental 3D super-localization with Laguerre–Gaussian modes
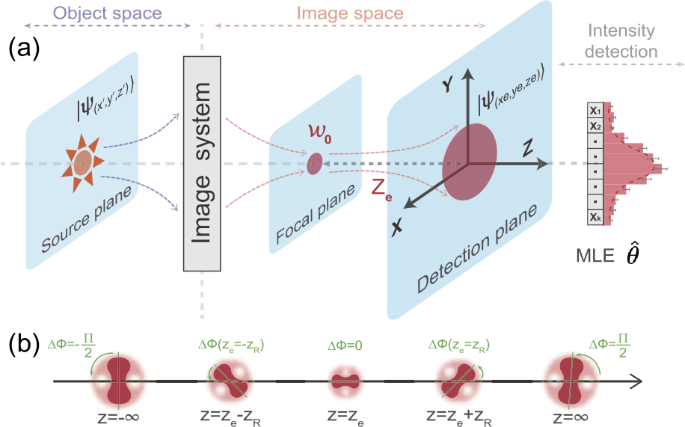
Improving three-dimensional (3D) localization precision is of paramount importance for super-resolution imaging. By properly engineering the point spread function (PSF), such as utilizing Laguerre–Gaussian (LG) modes and their superposition, the ultimate limits of 3D localization precision can be enhanced. However, achieving these limits is challenging, as it often involves complicated detection strategies and practical limitations. In this work, we rigorously derive the ultimate 3D localization limits of LG modes and their superposition, specifically rotation modes, in the multi-parameter estimation framework. Our findings reveal that a significant portion of the information required for achieving 3D super-localization of LG modes can be obtained through feasible intensity detection. Moreover, the 3D ultimate precision can be achieved when the azimuthal index l is zero. To provide a proof-of-principle demonstration, we develop an iterative maximum likelihood estimation (MLE) algorithm that converges to the 3D position of a point source, considering the pixelation and detector noise. The experimental implementation exhibits an improvement of up to two-fold in lateral localization precision and up to twenty-fold in axial localization precision when using LG modes compared to Gaussian mode. We also showcase the superior axial localization capability of the rotation mode within the near-focus region, effectively overcoming the limitations encountered by single LG modes. Notably, in the presence of realistic aberration, the algorithm robustly achieves the Cramér-Rao lower bound. Our findings provide valuable insights for evaluating and optimizing the achievable 3D localization precision, which will facilitate the advancements in super-resolution microscopy.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


