{"title":"基于类别平衡随机标注和深度一致性引导的移动激光扫描点云弱监督语义分割","authors":"Jiacheng Liu, Haiyan Guan, Xiangda Lei, Yongtao Yu","doi":"10.1111/phor.12468","DOIUrl":null,"url":null,"abstract":"Scene understanding of mobile laser scanning (MLS) point clouds is vital in autonomous driving and virtual reality. Most existing semantic segmentation methods rely on a large number of accurately labelled points, which is time-consuming and labour-intensive. To cope with this issue, this paper explores a weakly supervised learning (WSL) framework for MLS data. Specifically, a category balanced random annotation (CBRA) strategy is employed to obtain balanced labels and enhance model performance. Next, based on KPConv-Net as a backbone network, a WSL semantic segmentation framework is developed for MLS point clouds via a deep consistency-guided self-distillation (DCS) mechanism. The DCS mechanism consists of a deep consistency-guided self-distillation branch and an entropy regularisation branch. The self-distillation branch is designed by constructing an auxiliary network to maintain the consistency of predicted distributions between the auxiliary network and the original network, while the entropy regularisation branch is designed to increase the confidence of the network predicted results. The proposed WSL framework was evaluated on the WHU-MLS, NPM3D and Toronto3D datasets. By using only 0.1% labelled points, the proposed WSL framework achieved a competitive performance in MLS point cloud semantic segmentation with the mean Intersection over Union (mIoU) scores of 60.08%, 72.0% and 67.42% on the three datasets, respectively.","PeriodicalId":22881,"journal":{"name":"The Photogrammetric Record","volume":"39 2","pages":""},"PeriodicalIF":0.0000,"publicationDate":"2023-12-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":"{\"title\":\"Weakly supervised semantic segmentation of mobile laser scanning point clouds via category balanced random annotation and deep consistency-guided self-distillation mechanism\",\"authors\":\"Jiacheng Liu, Haiyan Guan, Xiangda Lei, Yongtao Yu\",\"doi\":\"10.1111/phor.12468\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"Scene understanding of mobile laser scanning (MLS) point clouds is vital in autonomous driving and virtual reality. Most existing semantic segmentation methods rely on a large number of accurately labelled points, which is time-consuming and labour-intensive. To cope with this issue, this paper explores a weakly supervised learning (WSL) framework for MLS data. Specifically, a category balanced random annotation (CBRA) strategy is employed to obtain balanced labels and enhance model performance. Next, based on KPConv-Net as a backbone network, a WSL semantic segmentation framework is developed for MLS point clouds via a deep consistency-guided self-distillation (DCS) mechanism. The DCS mechanism consists of a deep consistency-guided self-distillation branch and an entropy regularisation branch. The self-distillation branch is designed by constructing an auxiliary network to maintain the consistency of predicted distributions between the auxiliary network and the original network, while the entropy regularisation branch is designed to increase the confidence of the network predicted results. The proposed WSL framework was evaluated on the WHU-MLS, NPM3D and Toronto3D datasets. By using only 0.1% labelled points, the proposed WSL framework achieved a competitive performance in MLS point cloud semantic segmentation with the mean Intersection over Union (mIoU) scores of 60.08%, 72.0% and 67.42% on the three datasets, respectively.\",\"PeriodicalId\":22881,\"journal\":{\"name\":\"The Photogrammetric Record\",\"volume\":\"39 2\",\"pages\":\"\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2023-12-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"The Photogrammetric Record\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.1111/phor.12468\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"\",\"JCRName\":\"\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"The Photogrammetric Record","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1111/phor.12468","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
Weakly supervised semantic segmentation of mobile laser scanning point clouds via category balanced random annotation and deep consistency-guided self-distillation mechanism
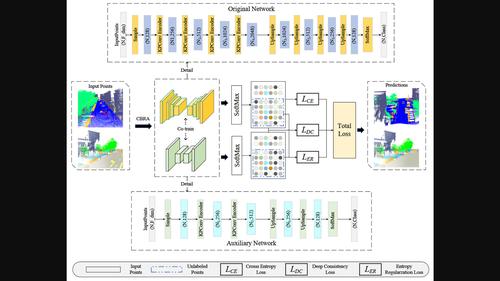
Scene understanding of mobile laser scanning (MLS) point clouds is vital in autonomous driving and virtual reality. Most existing semantic segmentation methods rely on a large number of accurately labelled points, which is time-consuming and labour-intensive. To cope with this issue, this paper explores a weakly supervised learning (WSL) framework for MLS data. Specifically, a category balanced random annotation (CBRA) strategy is employed to obtain balanced labels and enhance model performance. Next, based on KPConv-Net as a backbone network, a WSL semantic segmentation framework is developed for MLS point clouds via a deep consistency-guided self-distillation (DCS) mechanism. The DCS mechanism consists of a deep consistency-guided self-distillation branch and an entropy regularisation branch. The self-distillation branch is designed by constructing an auxiliary network to maintain the consistency of predicted distributions between the auxiliary network and the original network, while the entropy regularisation branch is designed to increase the confidence of the network predicted results. The proposed WSL framework was evaluated on the WHU-MLS, NPM3D and Toronto3D datasets. By using only 0.1% labelled points, the proposed WSL framework achieved a competitive performance in MLS point cloud semantic segmentation with the mean Intersection over Union (mIoU) scores of 60.08%, 72.0% and 67.42% on the three datasets, respectively.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


