Jingjing Xiao, Mengqiong Li, Chiming Wang, Jun Pi, Hui He
{"title":"超声辅助板层角膜移植术机器人系统的设计与研究","authors":"Jingjing Xiao, Mengqiong Li, Chiming Wang, Jun Pi, Hui He","doi":"10.1049/ccs2.12020","DOIUrl":null,"url":null,"abstract":"<p>In order to solve the problem of uncontrollable cutting depth and the rough incision edge of the cornea with manual trephine in lamellar keratoplasty, an ultrasonic-assisted corneal trephination method has been proposed for the first time in accordance with the advantage of ultrasonic vibration cutting, and the corresponding robotic system has been designed and researched. According to the traditional process of lamellar keratoplasty, the requirements of the surgical robotic system were first proposed. On this basis, the robotic system was designed and its schematic diagram was introduced. Second, the key components of the robotic body such as the eccentric adjusting mechanism and the end-effector of ultrasonic scalpel were illustrated, which can realise corneal trephination of different incision diameters without scalpel replacement. Then the operation flow chart of a robot-assisted lamellar keratoplasty was put forward. Finally, the preliminary verified experiments were performed using a grape and a porcine eyeball, respectively, in vitro with the prototype system. The results show that the robotic system can basically satisfy the operation requirements of lamellar keratoplasty. Owing to the less cutting force and smoother corneal incision edge of ultrasonic-assisted lamellar keratoplasty compared with manual trephine, it was proved to be more feasible and superior.</p>","PeriodicalId":33652,"journal":{"name":"Cognitive Computation and Systems","volume":"3 4","pages":"297-306"},"PeriodicalIF":1.3000,"publicationDate":"2021-05-21","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://ietresearch.onlinelibrary.wiley.com/doi/epdf/10.1049/ccs2.12020","citationCount":"0","resultStr":"{\"title\":\"Design and research of a robotic system for ultrasonic-assisted lamellar keratoplasty\",\"authors\":\"Jingjing Xiao, Mengqiong Li, Chiming Wang, Jun Pi, Hui He\",\"doi\":\"10.1049/ccs2.12020\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p>In order to solve the problem of uncontrollable cutting depth and the rough incision edge of the cornea with manual trephine in lamellar keratoplasty, an ultrasonic-assisted corneal trephination method has been proposed for the first time in accordance with the advantage of ultrasonic vibration cutting, and the corresponding robotic system has been designed and researched. According to the traditional process of lamellar keratoplasty, the requirements of the surgical robotic system were first proposed. On this basis, the robotic system was designed and its schematic diagram was introduced. Second, the key components of the robotic body such as the eccentric adjusting mechanism and the end-effector of ultrasonic scalpel were illustrated, which can realise corneal trephination of different incision diameters without scalpel replacement. Then the operation flow chart of a robot-assisted lamellar keratoplasty was put forward. Finally, the preliminary verified experiments were performed using a grape and a porcine eyeball, respectively, in vitro with the prototype system. The results show that the robotic system can basically satisfy the operation requirements of lamellar keratoplasty. Owing to the less cutting force and smoother corneal incision edge of ultrasonic-assisted lamellar keratoplasty compared with manual trephine, it was proved to be more feasible and superior.</p>\",\"PeriodicalId\":33652,\"journal\":{\"name\":\"Cognitive Computation and Systems\",\"volume\":\"3 4\",\"pages\":\"297-306\"},\"PeriodicalIF\":1.3000,\"publicationDate\":\"2021-05-21\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://ietresearch.onlinelibrary.wiley.com/doi/epdf/10.1049/ccs2.12020\",\"citationCount\":\"0\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Cognitive Computation and Systems\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://onlinelibrary.wiley.com/doi/10.1049/ccs2.12020\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q4\",\"JCRName\":\"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Cognitive Computation and Systems","FirstCategoryId":"1085","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1049/ccs2.12020","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
Design and research of a robotic system for ultrasonic-assisted lamellar keratoplasty
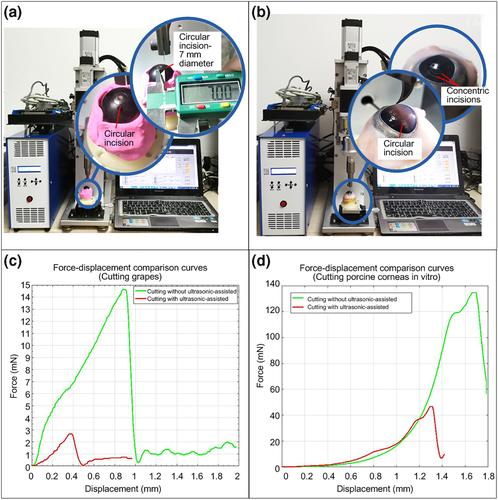
In order to solve the problem of uncontrollable cutting depth and the rough incision edge of the cornea with manual trephine in lamellar keratoplasty, an ultrasonic-assisted corneal trephination method has been proposed for the first time in accordance with the advantage of ultrasonic vibration cutting, and the corresponding robotic system has been designed and researched. According to the traditional process of lamellar keratoplasty, the requirements of the surgical robotic system were first proposed. On this basis, the robotic system was designed and its schematic diagram was introduced. Second, the key components of the robotic body such as the eccentric adjusting mechanism and the end-effector of ultrasonic scalpel were illustrated, which can realise corneal trephination of different incision diameters without scalpel replacement. Then the operation flow chart of a robot-assisted lamellar keratoplasty was put forward. Finally, the preliminary verified experiments were performed using a grape and a porcine eyeball, respectively, in vitro with the prototype system. The results show that the robotic system can basically satisfy the operation requirements of lamellar keratoplasty. Owing to the less cutting force and smoother corneal incision edge of ultrasonic-assisted lamellar keratoplasty compared with manual trephine, it was proved to be more feasible and superior.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


