{"title":"统一高架真空悬架系统的力学性能评价。","authors":"H Gholizadeh, E D Lemaire, R Salekrostam","doi":"10.33137/cpoj.v2i2.32941","DOIUrl":null,"url":null,"abstract":"<p><strong>Background: </strong>Small residual limb-socket displacement is a good indicator of prosthetic suspension system quality. Active vacuum suspension systems can decrease vertical movement inside the socket, compared to non-active suction systems. This study mechanically evaluated limb-socket displacement with the Össur Unity active vacuum system.</p><p><strong>Method: </strong>Forty-eight conditions were evaluated: four cylindrical and four conical sockets (polypropylene, polyethylene terephthalate glycol-modified (PETG), thermoset resin (acrylic), Thermolyn soft materials); two Iceross Seal-In V liners (standard, high profile); three vacuum conditions (active vacuum, inactive vacuum, no suction with valve open). An Instron 4428 test machine applied 0-100N linear ramped tensile loads to each positive mold, with the socket secured in place, while displacement between the mold and socket was recorded. Following the displacement tests, the load before failure (i.e., 10 mm displacement) was measured.</p><p><strong>Results: </strong>Average and standard deviations for movement between the mold and sockets were small. The displacement average for all conditions was 0.30±0.16mm for active vacuum, 0.32±0.16mm for inactive vacuum, and 0.39±0.22mm for no suction. Across all trials, active vacuum systems tolerated significantly (p<0.001) more load before failure (812±221N) compared to inactive vacuum (727±213N), and no suction (401±184N). The maximum load before failure (1142±53N) was for the cylindrical polypropylene socket and high-profile liner.</p><p><strong>Conclusion: </strong>The Unity system successfully controlled pistoning inside the socket for regular activity loads and also controlled the greatest traction loads. While relative movement was smallest for Unity, all conditions (inactive vacuum, no suction) were viable for loads less than 100N. Furthermore, similar results can be achieved when using different socket fabrication materials.</p>","PeriodicalId":32763,"journal":{"name":"Canadian Prosthetics Orthotics Journal","volume":"2 2","pages":"32941"},"PeriodicalIF":0.0000,"publicationDate":"2019-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10443497/pdf/","citationCount":"2","resultStr":"{\"title\":\"Mechanical Evaluation Of Unity Elevated Vacuum Suspension System.\",\"authors\":\"H Gholizadeh, E D Lemaire, R Salekrostam\",\"doi\":\"10.33137/cpoj.v2i2.32941\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><strong>Background: </strong>Small residual limb-socket displacement is a good indicator of prosthetic suspension system quality. Active vacuum suspension systems can decrease vertical movement inside the socket, compared to non-active suction systems. This study mechanically evaluated limb-socket displacement with the Össur Unity active vacuum system.</p><p><strong>Method: </strong>Forty-eight conditions were evaluated: four cylindrical and four conical sockets (polypropylene, polyethylene terephthalate glycol-modified (PETG), thermoset resin (acrylic), Thermolyn soft materials); two Iceross Seal-In V liners (standard, high profile); three vacuum conditions (active vacuum, inactive vacuum, no suction with valve open). An Instron 4428 test machine applied 0-100N linear ramped tensile loads to each positive mold, with the socket secured in place, while displacement between the mold and socket was recorded. Following the displacement tests, the load before failure (i.e., 10 mm displacement) was measured.</p><p><strong>Results: </strong>Average and standard deviations for movement between the mold and sockets were small. The displacement average for all conditions was 0.30±0.16mm for active vacuum, 0.32±0.16mm for inactive vacuum, and 0.39±0.22mm for no suction. Across all trials, active vacuum systems tolerated significantly (p<0.001) more load before failure (812±221N) compared to inactive vacuum (727±213N), and no suction (401±184N). The maximum load before failure (1142±53N) was for the cylindrical polypropylene socket and high-profile liner.</p><p><strong>Conclusion: </strong>The Unity system successfully controlled pistoning inside the socket for regular activity loads and also controlled the greatest traction loads. While relative movement was smallest for Unity, all conditions (inactive vacuum, no suction) were viable for loads less than 100N. Furthermore, similar results can be achieved when using different socket fabrication materials.</p>\",\"PeriodicalId\":32763,\"journal\":{\"name\":\"Canadian Prosthetics Orthotics Journal\",\"volume\":\"2 2\",\"pages\":\"32941\"},\"PeriodicalIF\":0.0000,\"publicationDate\":\"2019-01-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10443497/pdf/\",\"citationCount\":\"2\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Canadian Prosthetics Orthotics Journal\",\"FirstCategoryId\":\"1085\",\"ListUrlMain\":\"https://doi.org/10.33137/cpoj.v2i2.32941\",\"RegionNum\":0,\"RegionCategory\":null,\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"Medicine\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Canadian Prosthetics Orthotics Journal","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.33137/cpoj.v2i2.32941","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"Medicine","Score":null,"Total":0}
Mechanical Evaluation Of Unity Elevated Vacuum Suspension System.
Background: Small residual limb-socket displacement is a good indicator of prosthetic suspension system quality. Active vacuum suspension systems can decrease vertical movement inside the socket, compared to non-active suction systems. This study mechanically evaluated limb-socket displacement with the Össur Unity active vacuum system.
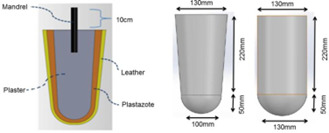
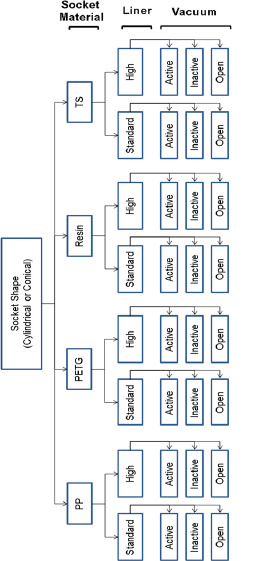
Method: Forty-eight conditions were evaluated: four cylindrical and four conical sockets (polypropylene, polyethylene terephthalate glycol-modified (PETG), thermoset resin (acrylic), Thermolyn soft materials); two Iceross Seal-In V liners (standard, high profile); three vacuum conditions (active vacuum, inactive vacuum, no suction with valve open). An Instron 4428 test machine applied 0-100N linear ramped tensile loads to each positive mold, with the socket secured in place, while displacement between the mold and socket was recorded. Following the displacement tests, the load before failure (i.e., 10 mm displacement) was measured.
Results: Average and standard deviations for movement between the mold and sockets were small. The displacement average for all conditions was 0.30±0.16mm for active vacuum, 0.32±0.16mm for inactive vacuum, and 0.39±0.22mm for no suction. Across all trials, active vacuum systems tolerated significantly (p<0.001) more load before failure (812±221N) compared to inactive vacuum (727±213N), and no suction (401±184N). The maximum load before failure (1142±53N) was for the cylindrical polypropylene socket and high-profile liner.
Conclusion: The Unity system successfully controlled pistoning inside the socket for regular activity loads and also controlled the greatest traction loads. While relative movement was smallest for Unity, all conditions (inactive vacuum, no suction) were viable for loads less than 100N. Furthermore, similar results can be achieved when using different socket fabrication materials.


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


