Berat Denizdurduran, Henry Markram, Marc-Oliver Gewaltig
{"title":"基于模型预测控制和深度强化学习的肌肉骨骼系统最优轨迹学习。","authors":"Berat Denizdurduran, Henry Markram, Marc-Oliver Gewaltig","doi":"10.1007/s00422-022-00940-x","DOIUrl":null,"url":null,"abstract":"<p><p>From the computational point of view, musculoskeletal control is the problem of controlling high degrees of freedom and dynamic multi-body system that is driven by redundant muscle units. A critical challenge in the control perspective of skeletal joints with antagonistic muscle pairs is finding methods robust to address this ill-posed nonlinear problem. To address this computational problem, we implemented a twofold optimization and learning framework to be specialized in addressing the redundancies in the muscle control . In the first part, we used model predictive control to obtain energy efficient skeletal trajectories to mimick human movements. The second part is to use deep reinforcement learning to obtain a sequence of stimulus to be given to muscles in order to obtain the skeletal trajectories with muscle control. We observed that the desired stimulus to muscles is only efficiently constructed by integrating the state and control input in a closed-loop setting as it resembles the proprioceptive integration in the spinal cord circuits. In this work, we showed how a variety of different reference trajectories can be obtained with optimal control and how these reference trajectories are mapped to the musculoskeletal control with deep reinforcement learning. Starting from the characteristics of human arm movement to obstacle avoidance experiment, our simulation results confirm the capabilities of our optimization and learning framework for a variety of dynamic movement trajectories. In summary, the proposed framework is offering a pipeline to complement the lack of experiments to record human motion-capture data as well as study the activation range of muscles to replicate the specific trajectory of interest. Using the trajectories from optimal control as a reference signal for reinforcement learning implementation has allowed us to acquire optimum and human-like behaviour of the musculoskeletal system which provides a framework to study human movement in-silico experiments. The present framework can also allow studying upper-arm rehabilitation with assistive robots given that one can use healthy subject movement recordings as reference to work on the control architecture of assistive robotics in order to compensate behavioural deficiencies. Hence, the framework opens to possibility of replicating or complementing labour-intensive, time-consuming and costly experiments with human subjects in the field of movement studies and digital twin of rehabilitation.</p>","PeriodicalId":55374,"journal":{"name":"Biological Cybernetics","volume":"116 5-6","pages":"711-726"},"PeriodicalIF":1.6000,"publicationDate":"2022-12-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC9691497/pdf/","citationCount":"2","resultStr":"{\"title\":\"Optimum trajectory learning in musculoskeletal systems with model predictive control and deep reinforcement learning.\",\"authors\":\"Berat Denizdurduran, Henry Markram, Marc-Oliver Gewaltig\",\"doi\":\"10.1007/s00422-022-00940-x\",\"DOIUrl\":null,\"url\":null,\"abstract\":\"<p><p>From the computational point of view, musculoskeletal control is the problem of controlling high degrees of freedom and dynamic multi-body system that is driven by redundant muscle units. A critical challenge in the control perspective of skeletal joints with antagonistic muscle pairs is finding methods robust to address this ill-posed nonlinear problem. To address this computational problem, we implemented a twofold optimization and learning framework to be specialized in addressing the redundancies in the muscle control . In the first part, we used model predictive control to obtain energy efficient skeletal trajectories to mimick human movements. The second part is to use deep reinforcement learning to obtain a sequence of stimulus to be given to muscles in order to obtain the skeletal trajectories with muscle control. We observed that the desired stimulus to muscles is only efficiently constructed by integrating the state and control input in a closed-loop setting as it resembles the proprioceptive integration in the spinal cord circuits. In this work, we showed how a variety of different reference trajectories can be obtained with optimal control and how these reference trajectories are mapped to the musculoskeletal control with deep reinforcement learning. Starting from the characteristics of human arm movement to obstacle avoidance experiment, our simulation results confirm the capabilities of our optimization and learning framework for a variety of dynamic movement trajectories. In summary, the proposed framework is offering a pipeline to complement the lack of experiments to record human motion-capture data as well as study the activation range of muscles to replicate the specific trajectory of interest. Using the trajectories from optimal control as a reference signal for reinforcement learning implementation has allowed us to acquire optimum and human-like behaviour of the musculoskeletal system which provides a framework to study human movement in-silico experiments. The present framework can also allow studying upper-arm rehabilitation with assistive robots given that one can use healthy subject movement recordings as reference to work on the control architecture of assistive robotics in order to compensate behavioural deficiencies. Hence, the framework opens to possibility of replicating or complementing labour-intensive, time-consuming and costly experiments with human subjects in the field of movement studies and digital twin of rehabilitation.</p>\",\"PeriodicalId\":55374,\"journal\":{\"name\":\"Biological Cybernetics\",\"volume\":\"116 5-6\",\"pages\":\"711-726\"},\"PeriodicalIF\":1.6000,\"publicationDate\":\"2022-12-01\",\"publicationTypes\":\"Journal Article\",\"fieldsOfStudy\":null,\"isOpenAccess\":false,\"openAccessPdf\":\"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC9691497/pdf/\",\"citationCount\":\"2\",\"resultStr\":null,\"platform\":\"Semanticscholar\",\"paperid\":null,\"PeriodicalName\":\"Biological Cybernetics\",\"FirstCategoryId\":\"5\",\"ListUrlMain\":\"https://doi.org/10.1007/s00422-022-00940-x\",\"RegionNum\":4,\"RegionCategory\":\"工程技术\",\"ArticlePicture\":[],\"TitleCN\":null,\"AbstractTextCN\":null,\"PMCID\":null,\"EPubDate\":\"\",\"PubModel\":\"\",\"JCR\":\"Q3\",\"JCRName\":\"COMPUTER SCIENCE, CYBERNETICS\",\"Score\":null,\"Total\":0}","platform":"Semanticscholar","paperid":null,"PeriodicalName":"Biological Cybernetics","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1007/s00422-022-00940-x","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"COMPUTER SCIENCE, CYBERNETICS","Score":null,"Total":0}
Optimum trajectory learning in musculoskeletal systems with model predictive control and deep reinforcement learning.
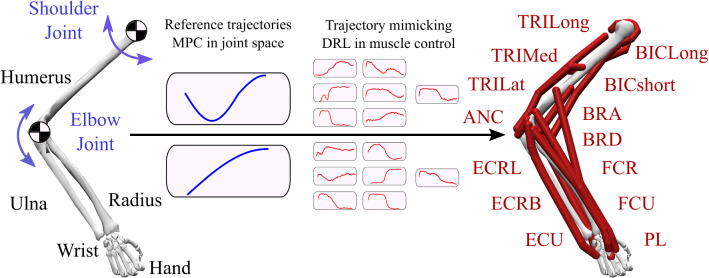
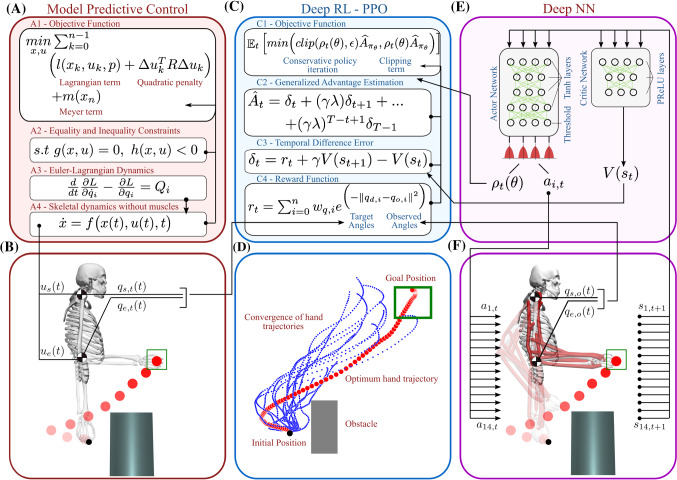
From the computational point of view, musculoskeletal control is the problem of controlling high degrees of freedom and dynamic multi-body system that is driven by redundant muscle units. A critical challenge in the control perspective of skeletal joints with antagonistic muscle pairs is finding methods robust to address this ill-posed nonlinear problem. To address this computational problem, we implemented a twofold optimization and learning framework to be specialized in addressing the redundancies in the muscle control . In the first part, we used model predictive control to obtain energy efficient skeletal trajectories to mimick human movements. The second part is to use deep reinforcement learning to obtain a sequence of stimulus to be given to muscles in order to obtain the skeletal trajectories with muscle control. We observed that the desired stimulus to muscles is only efficiently constructed by integrating the state and control input in a closed-loop setting as it resembles the proprioceptive integration in the spinal cord circuits. In this work, we showed how a variety of different reference trajectories can be obtained with optimal control and how these reference trajectories are mapped to the musculoskeletal control with deep reinforcement learning. Starting from the characteristics of human arm movement to obstacle avoidance experiment, our simulation results confirm the capabilities of our optimization and learning framework for a variety of dynamic movement trajectories. In summary, the proposed framework is offering a pipeline to complement the lack of experiments to record human motion-capture data as well as study the activation range of muscles to replicate the specific trajectory of interest. Using the trajectories from optimal control as a reference signal for reinforcement learning implementation has allowed us to acquire optimum and human-like behaviour of the musculoskeletal system which provides a framework to study human movement in-silico experiments. The present framework can also allow studying upper-arm rehabilitation with assistive robots given that one can use healthy subject movement recordings as reference to work on the control architecture of assistive robotics in order to compensate behavioural deficiencies. Hence, the framework opens to possibility of replicating or complementing labour-intensive, time-consuming and costly experiments with human subjects in the field of movement studies and digital twin of rehabilitation.
期刊介绍:
Biological Cybernetics is an interdisciplinary medium for theoretical and application-oriented aspects of information processing in organisms, including sensory, motor, cognitive, and ecological phenomena. Topics covered include: mathematical modeling of biological systems; computational, theoretical or engineering studies with relevance for understanding biological information processing; and artificial implementation of biological information processing and self-organizing principles. Under the main aspects of performance and function of systems, emphasis is laid on communication between life sciences and technical/theoretical disciplines.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


