{"title":"Controlling stick balancing on a linear track: Delayed state feedback or delay-compensating predictor feedback?","authors":"Dalma J Nagy, John G Milton, Tamas Insperger","doi":"10.1007/s00422-023-00957-w","DOIUrl":null,"url":null,"abstract":"<p><p>A planar stick balancing task was investigated using stabilometry parameters (SP); a concept initially developed to assess the stability of human postural sway. Two subject groups were investigated: 6 subjects (MD) with many days of balancing a 90 cm stick on a linear track and 25 subjects (OD) with only one day of balancing experience. The underlying mechanical model is a pendulum-cart system. Two control force models were investigated by means of numerical simulations: (1) delayed state feedback (DSF); and (2) delay-compensating predictor feedback (PF). Both models require an internal model and are subject to certainty thresholds with delayed switching. Measured and simulated time histories were compared quantitatively using a cost function in terms of some essential SPs for all subjects. Minimization of the cost function showed that the control strategy of both OD and MD subjects can better be described by DSF. The control mechanism for the MD subjects was superior in two aspects: (1) they devoted less energy to controlling the cart's position; and (2) their perception threshold for the stick's angular velocity was found to be smaller. Findings support the concept that when sufficient sensory information is readily available, a delay-compensating PF strategy is not necessary.</p>","PeriodicalId":55374,"journal":{"name":"Biological Cybernetics","volume":"117 1-2","pages":"113-127"},"PeriodicalIF":1.6000,"publicationDate":"2023-04-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10160210/pdf/","citationCount":"1","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Biological Cybernetics","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1007/s00422-023-00957-w","RegionNum":4,"RegionCategory":"工程技术","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"COMPUTER SCIENCE, CYBERNETICS","Score":null,"Total":0}
引用次数: 1
Abstract
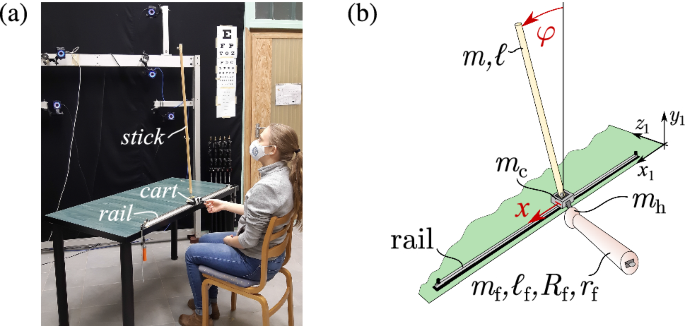
A planar stick balancing task was investigated using stabilometry parameters (SP); a concept initially developed to assess the stability of human postural sway. Two subject groups were investigated: 6 subjects (MD) with many days of balancing a 90 cm stick on a linear track and 25 subjects (OD) with only one day of balancing experience. The underlying mechanical model is a pendulum-cart system. Two control force models were investigated by means of numerical simulations: (1) delayed state feedback (DSF); and (2) delay-compensating predictor feedback (PF). Both models require an internal model and are subject to certainty thresholds with delayed switching. Measured and simulated time histories were compared quantitatively using a cost function in terms of some essential SPs for all subjects. Minimization of the cost function showed that the control strategy of both OD and MD subjects can better be described by DSF. The control mechanism for the MD subjects was superior in two aspects: (1) they devoted less energy to controlling the cart's position; and (2) their perception threshold for the stick's angular velocity was found to be smaller. Findings support the concept that when sufficient sensory information is readily available, a delay-compensating PF strategy is not necessary.
期刊介绍:
Biological Cybernetics is an interdisciplinary medium for theoretical and application-oriented aspects of information processing in organisms, including sensory, motor, cognitive, and ecological phenomena. Topics covered include: mathematical modeling of biological systems; computational, theoretical or engineering studies with relevance for understanding biological information processing; and artificial implementation of biological information processing and self-organizing principles. Under the main aspects of performance and function of systems, emphasis is laid on communication between life sciences and technical/theoretical disciplines.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


