Peter Somers, Simon Holdenried-Krafft, Johannes Zahn, Johannes Schüle, Carina Veil, Niklas Harland, Simon Walz, Arnulf Stenzl, Oliver Sawodny, Cristina Tarín, Hendrik P A Lensch
{"title":"Cystoscopic depth estimation using gated adversarial domain adaptation.","authors":"Peter Somers, Simon Holdenried-Krafft, Johannes Zahn, Johannes Schüle, Carina Veil, Niklas Harland, Simon Walz, Arnulf Stenzl, Oliver Sawodny, Cristina Tarín, Hendrik P A Lensch","doi":"10.1007/s13534-023-00261-3","DOIUrl":null,"url":null,"abstract":"<p><p>Monocular depth estimation from camera images is very important for surrounding scene evaluation in many technical fields from automotive to medicine. However, traditional triangulation methods using stereo cameras or multiple views with the assumption of a rigid environment are not applicable for endoscopic domains. Particularly in cystoscopies it is not possible to produce ground truth depth information to directly train machine learning algorithms for using a monocular image directly for depth prediction. This work considers first creating a synthetic cystoscopic environment for initial encoding of depth information from synthetically rendered images. Next, the task of predicting pixel-wise depth values for real images is constrained to a domain adaption between the synthetic and real image domains. This adaptation is done through added gated residual blocks in order to simplify the network task and maintain training stability during adversarial training. Training is done on an internally collected cystoscopy dataset from human patients. The results after training demonstrate the ability to predict reasonable depth estimations from actual cystoscopic videos and added stability from using gated residual blocks is shown to prevent mode collapse during adversarial training.</p>","PeriodicalId":46898,"journal":{"name":"Biomedical Engineering Letters","volume":"13 2","pages":"141-151"},"PeriodicalIF":3.2000,"publicationDate":"2023-05-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC10130294/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Biomedical Engineering Letters","FirstCategoryId":"5","ListUrlMain":"https://doi.org/10.1007/s13534-023-00261-3","RegionNum":4,"RegionCategory":"医学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"ENGINEERING, BIOMEDICAL","Score":null,"Total":0}
引用次数: 0
Abstract
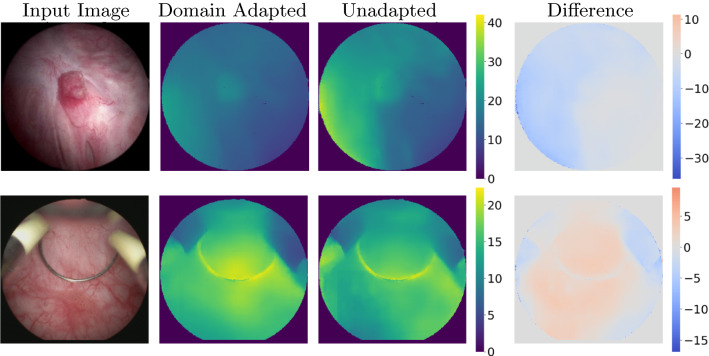
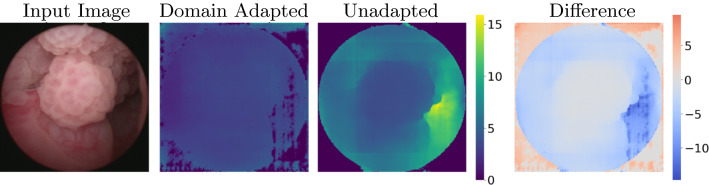
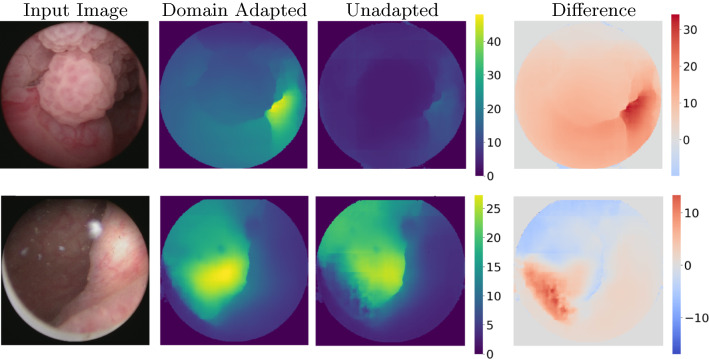
Monocular depth estimation from camera images is very important for surrounding scene evaluation in many technical fields from automotive to medicine. However, traditional triangulation methods using stereo cameras or multiple views with the assumption of a rigid environment are not applicable for endoscopic domains. Particularly in cystoscopies it is not possible to produce ground truth depth information to directly train machine learning algorithms for using a monocular image directly for depth prediction. This work considers first creating a synthetic cystoscopic environment for initial encoding of depth information from synthetically rendered images. Next, the task of predicting pixel-wise depth values for real images is constrained to a domain adaption between the synthetic and real image domains. This adaptation is done through added gated residual blocks in order to simplify the network task and maintain training stability during adversarial training. Training is done on an internally collected cystoscopy dataset from human patients. The results after training demonstrate the ability to predict reasonable depth estimations from actual cystoscopic videos and added stability from using gated residual blocks is shown to prevent mode collapse during adversarial training.
期刊介绍:
Biomedical Engineering Letters (BMEL) aims to present the innovative experimental science and technological development in the biomedical field as well as clinical application of new development. The article must contain original biomedical engineering content, defined as development, theoretical analysis, and evaluation/validation of a new technique. BMEL publishes the following types of papers: original articles, review articles, editorials, and letters to the editor. All the papers are reviewed in single-blind fashion.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


