Filippo Santoni de Sio, Giulio Mecacci, Simeon Calvert, Daniel Heikoop, Marjan Hagenzieker, Bart van Arem
{"title":"Realising Meaningful Human Control Over Automated Driving Systems: A Multidisciplinary Approach.","authors":"Filippo Santoni de Sio, Giulio Mecacci, Simeon Calvert, Daniel Heikoop, Marjan Hagenzieker, Bart van Arem","doi":"10.1007/s11023-022-09608-8","DOIUrl":null,"url":null,"abstract":"<p><p>The paper presents a framework to realise \"meaningful human control\" over Automated Driving Systems. The framework is based on an original synthesis of the results of the multidisciplinary research project \"Meaningful Human Control over Automated Driving Systems\" lead by a team of engineers, philosophers, and psychologists at Delft University of the Technology from 2017 to 2021. Meaningful human control aims at protecting safety and reducing responsibility gaps. The framework is based on the core assumption that human persons and institutions, not hardware and software and their algorithms, should remain ultimately-though not necessarily directly-in control of, and thus morally responsible for, the potentially dangerous operation of driving in mixed traffic. We propose an Automated Driving System to be under meaningful human control if it behaves according to the relevant reasons of the relevant human actors (tracking), and that any potentially dangerous event can be related to a human actor (tracing). We operationalise the requirements for meaningful human control through multidisciplinary work in philosophy, behavioural psychology and traffic engineering. The tracking condition is operationalised via a proximal scale of reasons and the tracing condition via an evaluation cascade table. We review the implications and requirements for the behaviour and skills of human actors, in particular related to supervisory control and driver education. We show how the evaluation cascade table can be applied in concrete engineering use cases in combination with the definition of core components to expose deficiencies in traceability, thereby avoiding so-called responsibility gaps. Future research directions are proposed to expand the philosophical framework and use cases, supervisory control and driver education, real-world pilots and institutional embedding.</p>","PeriodicalId":51133,"journal":{"name":"Minds and Machines","volume":" ","pages":"1-25"},"PeriodicalIF":3.4000,"publicationDate":"2022-07-28","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC9330947/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Minds and Machines","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1007/s11023-022-09608-8","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE","Score":null,"Total":0}
引用次数: 0
Abstract
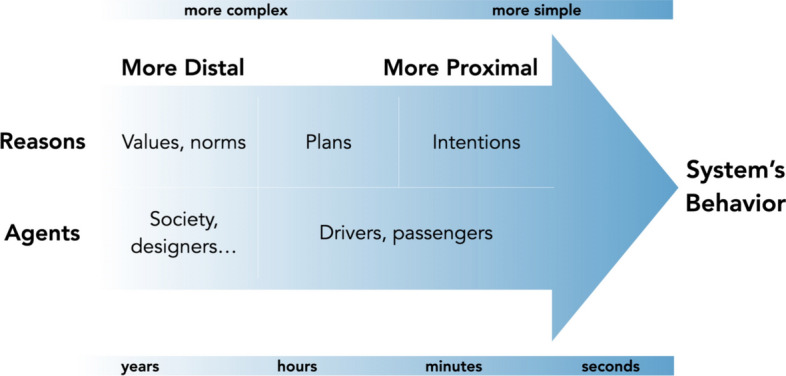
The paper presents a framework to realise "meaningful human control" over Automated Driving Systems. The framework is based on an original synthesis of the results of the multidisciplinary research project "Meaningful Human Control over Automated Driving Systems" lead by a team of engineers, philosophers, and psychologists at Delft University of the Technology from 2017 to 2021. Meaningful human control aims at protecting safety and reducing responsibility gaps. The framework is based on the core assumption that human persons and institutions, not hardware and software and their algorithms, should remain ultimately-though not necessarily directly-in control of, and thus morally responsible for, the potentially dangerous operation of driving in mixed traffic. We propose an Automated Driving System to be under meaningful human control if it behaves according to the relevant reasons of the relevant human actors (tracking), and that any potentially dangerous event can be related to a human actor (tracing). We operationalise the requirements for meaningful human control through multidisciplinary work in philosophy, behavioural psychology and traffic engineering. The tracking condition is operationalised via a proximal scale of reasons and the tracing condition via an evaluation cascade table. We review the implications and requirements for the behaviour and skills of human actors, in particular related to supervisory control and driver education. We show how the evaluation cascade table can be applied in concrete engineering use cases in combination with the definition of core components to expose deficiencies in traceability, thereby avoiding so-called responsibility gaps. Future research directions are proposed to expand the philosophical framework and use cases, supervisory control and driver education, real-world pilots and institutional embedding.
期刊介绍:
Minds and Machines, affiliated with the Society for Machines and Mentality, serves as a platform for fostering critical dialogue between the AI and philosophical communities. With a focus on problems of shared interest, the journal actively encourages discussions on the philosophical aspects of computer science.
Offering a global forum, Minds and Machines provides a space to debate and explore important and contentious issues within its editorial focus. The journal presents special editions dedicated to specific topics, invites critical responses to previously published works, and features review essays addressing current problem scenarios.
By facilitating a diverse range of perspectives, Minds and Machines encourages a reevaluation of the status quo and the development of new insights. Through this collaborative approach, the journal aims to bridge the gap between AI and philosophy, fostering a tradition of critique and ensuring these fields remain connected and relevant.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


