Automatic calibration of terrestrial laser scanners using intensity features
引用次数: 0
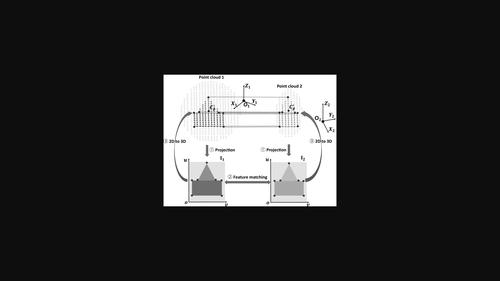
Abstract
We propose an in situ self‐calibration method by detecting and matching intensity features on the local planes in overlapping point clouds based on the Förstner operator. We successfully matched the intensity features from scans at different locations by feature matching on common local planes rather than on the rasterised grids of the horizontal and vertical angles adopted by the affirmed keypoint‐based algorithm. The capability of extracting features from different stations offers the possibility of comprehensive scanner calibration, solving the disadvantage that the existing keypoint‐based methods can only estimate the two‐face‐sensitive model parameters. The proposed algorithm has been tested with a high‐precision panoramic scanner, Leica RTC360, using datasets from a calibration hall and a general working scenario. It has been shown that the proposed approach consistently calibrates the two‐face‐sensitive model parameters with the affirmed keypoint‐based one. For the case of comprehensive calibration with the offset estimated and some angular parameters separated where the previous keypoint‐based one failed, the proposed algorithm achieves an accuracy of 0.16 mm, 2.7″ and 2.1″ in range, azimuth and elevation for the estimated target centres. The proposed algorithm can accurately calibrate two‐face‐sensitive and more comprehensive model parameters without any preparation on‐site, for example, mounting targets.
利用强度特征自动校准地面激光扫描仪
本文提出了一种基于Förstner算子的重叠点云局部平面强度特征检测与匹配的原位自校准方法。我们通过在共同局部平面上的特征匹配来成功匹配不同位置扫描的强度特征,而不是采用基于确认关键点的算法所采用的水平和垂直角度的光栅网格。从不同台站提取特征的能力为全面的扫描仪校准提供了可能,解决了现有基于关键点的方法只能估计双面敏感模型参数的缺点。该算法已在高精度全景扫描仪徕卡RTC360上进行了测试,使用来自校准大厅的数据集和一般工作场景。结果表明,该方法与确定的基于关键点的模型参数一致地校准了两个面敏感模型参数。对于先前基于关键点的校准失败的偏移量估计和一些角度参数分离的综合校准情况,该算法对估计的目标中心的距离,方位角和仰角精度分别达到0.16 mm, 2.7″和2.1″。该算法可以准确地校准两面敏感的更全面的模型参数,而无需进行任何现场准备,例如安装目标。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


