{"title":"Platoon control of connected vehicles with heterogeneous model structures considering external disturbances","authors":"Yongfu Li , Zongyu Qin , Hao Zhu , Srinivas Peeta , Xinbo Gao","doi":"10.1016/j.geits.2022.100038","DOIUrl":null,"url":null,"abstract":"<div><p>This article studies the distributed cooperative control problem with the heterogeneous model structures and external disturbances for the connected vehicle (CV) platoon. We propose a hierarchical framework to separate information flow topology from local dynamics control, which aims to deal with the heterogeneous model structures of CV platoon. This hierarchical framework splits the control scheme into two layers, which include an observer in the upper-level layer and an integral sliding mode (ISM) controller in the lower-level layer. Then, the conditions for the asymptotic stability of the CV platoon are derived and the effectiveness of the ISM controller is demonstrated through the Lyapunov method. The research shows that compared with the traditional methods, the hierarchical framework does not need to specify the topology structure as a commonly used topology. Finally, numerical simulation results are performed to test the effectiveness and superiority of the developed controller.</p></div>","PeriodicalId":100596,"journal":{"name":"Green Energy and Intelligent Transportation","volume":"1 3","pages":"Article 100038"},"PeriodicalIF":0.0000,"publicationDate":"2022-12-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.sciencedirect.com/science/article/pii/S277315372200038X/pdfft?md5=5c6a5baae0b501f70bc080f4cd19eae7&pid=1-s2.0-S277315372200038X-main.pdf","citationCount":"1","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Green Energy and Intelligent Transportation","FirstCategoryId":"1085","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S277315372200038X","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
引用次数: 1
Abstract
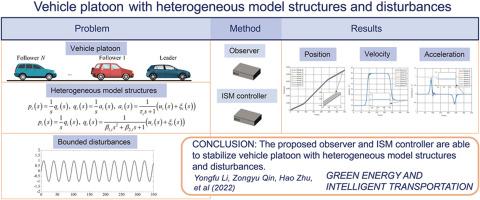
This article studies the distributed cooperative control problem with the heterogeneous model structures and external disturbances for the connected vehicle (CV) platoon. We propose a hierarchical framework to separate information flow topology from local dynamics control, which aims to deal with the heterogeneous model structures of CV platoon. This hierarchical framework splits the control scheme into two layers, which include an observer in the upper-level layer and an integral sliding mode (ISM) controller in the lower-level layer. Then, the conditions for the asymptotic stability of the CV platoon are derived and the effectiveness of the ISM controller is demonstrated through the Lyapunov method. The research shows that compared with the traditional methods, the hierarchical framework does not need to specify the topology structure as a commonly used topology. Finally, numerical simulation results are performed to test the effectiveness and superiority of the developed controller.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


