{"title":"Trajectory-tracking controller for vehicles on inclined road based on Udwadia – Kalaba equation","authors":"Xingyu Li , Xinle Gong , Jin Huang , Ye-Hwa Chen","doi":"10.1016/j.geits.2022.100021","DOIUrl":null,"url":null,"abstract":"<div><p>Vehicle lateral control is an important subtask of vehicle autonomous driving. There are many external disturbances that will affect the lateral control accuracy of the vehicle, and the inclination of the road is one of the most important ones. The inclined road will lead to additional lateral forces on the vehicle and will also change the magnitude of support force on the vehicle. The change of lateral force and support force will ultimately affect the trajectory tracking performance of the vehicle. Most of the current trajectory tracking methods only consider the trajectory tracking problem on the plane. If the influence of the road surface is considered in the design of the vehicle's trajectory tracking controller, the dynamic response and the tracking accuracy of the vehicle can be improved. This paper proposes a method based on Udwadia–Kalaba equation to calculate the normal and lateral force on a vehicle tracking a desired trajectory on an inclined road. Further, a trajectory tracking controller that considers the road inclination is designed. Finally, the simulation of trajectory tracking performance with an inclination angle is carried out to verify the effectiveness of the proposed controller.</p></div>","PeriodicalId":100596,"journal":{"name":"Green Energy and Intelligent Transportation","volume":"1 3","pages":"Article 100021"},"PeriodicalIF":0.0000,"publicationDate":"2022-12-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.sciencedirect.com/science/article/pii/S2773153722000214/pdfft?md5=7fa5633003f7d4b84ff724171f7e8a5d&pid=1-s2.0-S2773153722000214-main.pdf","citationCount":"2","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Green Energy and Intelligent Transportation","FirstCategoryId":"1085","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2773153722000214","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
引用次数: 2
Abstract
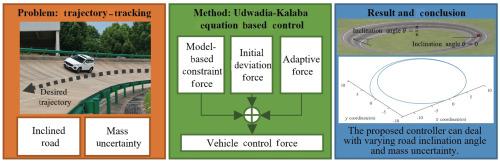
Vehicle lateral control is an important subtask of vehicle autonomous driving. There are many external disturbances that will affect the lateral control accuracy of the vehicle, and the inclination of the road is one of the most important ones. The inclined road will lead to additional lateral forces on the vehicle and will also change the magnitude of support force on the vehicle. The change of lateral force and support force will ultimately affect the trajectory tracking performance of the vehicle. Most of the current trajectory tracking methods only consider the trajectory tracking problem on the plane. If the influence of the road surface is considered in the design of the vehicle's trajectory tracking controller, the dynamic response and the tracking accuracy of the vehicle can be improved. This paper proposes a method based on Udwadia–Kalaba equation to calculate the normal and lateral force on a vehicle tracking a desired trajectory on an inclined road. Further, a trajectory tracking controller that considers the road inclination is designed. Finally, the simulation of trajectory tracking performance with an inclination angle is carried out to verify the effectiveness of the proposed controller.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


