A low‐drift and real‐time localisation and mapping method for handheld hemispherical view LiDAR‐IMU integration system
引用次数: 1
Abstract
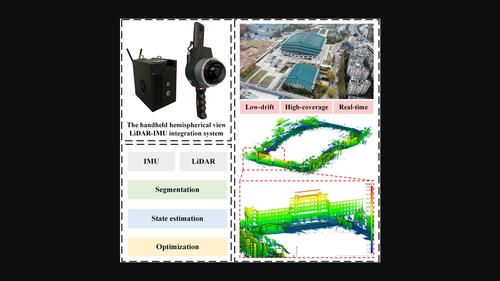
This paper proposes a simultaneous localisation and mapping (SLAM) framework that uses a handheld hemispherical view LiDAR‐IMU integration system. Inspired by the specific characteristic of the hemispherical view LiDAR, a ground segmentation module based on seed points is designed. The ground points are then downsampled to eliminate redundant vertical constraints. The IMU data and the pre‐processed point cloud are used to perform state estimation via a tightly coupled iterative extended Kalman filter (iEKF) to obtain the pose estimation. The automatically detected loop closures provide closed‐loop constraints for the odometry, and a factor graph ensures the global consistency of the map. Data from diverse scenes are collected via a prototype system. Both qualitative and quantitative experiments are carried out to verify the framework's performance. According to the experimental results, our framework achieves low‐drift, high‐coverage and real‐time performance, outperforming the state‐of‐the‐art LiDAR SLAM methods in our handheld hemispherical view LiDAR‐IMU test sites. For the research community's benefit, the dataset is publicly provided for other researchers to compare against.
一种用于手持式半球形激光雷达- IMU集成系统的低漂移实时定位和制图方法
本文提出了一种同时定位和映射(SLAM)框架,该框架使用手持式半球形视图LiDAR - IMU集成系统。根据半球面激光雷达的特点,设计了基于种子点的地面分割模块。然后对接地点进行下采样以消除冗余的垂直约束。利用IMU数据和预处理后的点云,通过紧耦合迭代扩展卡尔曼滤波(iEKF)进行状态估计,得到姿态估计。自动检测的闭环闭包为里程计提供闭环约束,因子图确保地图的全局一致性。通过原型系统收集来自不同场景的数据。通过定性和定量实验验证了该框架的性能。根据实验结果,我们的框架实现了低漂移、高覆盖和实时性能,在我们的手持式半球形LiDAR - IMU测试站点中优于最先进的LiDAR SLAM方法。为了研究界的利益,数据集公开提供给其他研究人员进行比较。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


