{"title":"Interacting multiple model-based ETUKF for efficient state estimation of connected vehicles with V2V communication","authors":"Yan Wang, Zhongxu Hu, Shanhe Lou, Chen Lv","doi":"10.1016/j.geits.2022.100044","DOIUrl":null,"url":null,"abstract":"<div><p>Accurate prediction of the motion state of the connected vehicles, especially the preceding vehicle (PV), would effectively improve the decision-making and path planning of intelligent vehicles. The evolution of vehicle-to-vehicle (V2V) communication technology makes it possible to exchange data between vehicles. However, since V2V communication has a transmission interval, which will result in the host vehicle not receiving information from the PV within the time interval. Furthermore, V2V communication is a time-triggered system that may occupy more communication bandwidth than required. On the other hand, traditional estimation methods of the PV state based on individual models are usually not applicable to a wide range of driving conditions. To address these issues, an event-triggered unscented Kalman filter (ETUKF) is first employed to estimate the PV state to strike a balance between estimation accuracy and communication cost. Then, an interactive multi-model (IMM) approach is combined with ETUKF to form IMMETUKF to further improve the estimation accuracy and applicability. Finally, simulation experiments under different driving conditions are implemented to verify the effectiveness of IMMETUKF. The test results indicated that the IMMETUKF has high estimation accuracy even when the communication rate is reduced to 14.84% and the proposed algorithm is highly adaptable to different driving conditions.</p></div>","PeriodicalId":100596,"journal":{"name":"Green Energy and Intelligent Transportation","volume":"2 1","pages":"Article 100044"},"PeriodicalIF":0.0000,"publicationDate":"2023-02-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"2","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Green Energy and Intelligent Transportation","FirstCategoryId":"1085","ListUrlMain":"https://www.sciencedirect.com/science/article/pii/S2773153722000445","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"","JCRName":"","Score":null,"Total":0}
引用次数: 2
Abstract
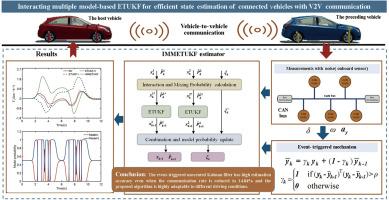
Accurate prediction of the motion state of the connected vehicles, especially the preceding vehicle (PV), would effectively improve the decision-making and path planning of intelligent vehicles. The evolution of vehicle-to-vehicle (V2V) communication technology makes it possible to exchange data between vehicles. However, since V2V communication has a transmission interval, which will result in the host vehicle not receiving information from the PV within the time interval. Furthermore, V2V communication is a time-triggered system that may occupy more communication bandwidth than required. On the other hand, traditional estimation methods of the PV state based on individual models are usually not applicable to a wide range of driving conditions. To address these issues, an event-triggered unscented Kalman filter (ETUKF) is first employed to estimate the PV state to strike a balance between estimation accuracy and communication cost. Then, an interactive multi-model (IMM) approach is combined with ETUKF to form IMMETUKF to further improve the estimation accuracy and applicability. Finally, simulation experiments under different driving conditions are implemented to verify the effectiveness of IMMETUKF. The test results indicated that the IMMETUKF has high estimation accuracy even when the communication rate is reduced to 14.84% and the proposed algorithm is highly adaptable to different driving conditions.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


