Mahesh P. Nagarkar, Yogesh J. Bhalerao, Gahininath J. Vikhe Patil, Rahul N. Zaware Patil
{"title":"GA-based multi-objective optimization of active nonlinear quarter car suspension system—PID and fuzzy logic control","authors":"Mahesh P. Nagarkar, Yogesh J. Bhalerao, Gahininath J. Vikhe Patil, Rahul N. Zaware Patil","doi":"10.1186/s40712-018-0096-8","DOIUrl":null,"url":null,"abstract":"<p>The primary function of a suspension system is to isolate the vehicle body from road irregularities thus providing the ride comfort and to support the vehicle and provide stability. The suspension system has to perform conflicting requirements; hence, a passive suspension system is replaced by the active suspension system which can supply force to the system. Active suspension supplies energy to respond dynamically and achieve relative motion between body and wheel and thus improves the performance of suspension system.</p><p>This study presents modelling and control optimization of a nonlinear quarter car suspension system. A mathematical model of nonlinear quarter car is developed and simulated for control and optimization in Matlab/Simulink? environment. Class C road is selected as input road condition with the vehicle traveling at 80?kmph. Active control of the suspension system is achieved using FLC and PID control actions. Instead of guessing and or trial and error method, genetic algorithm (GA)-based optimization algorithm is implemented to tune PID parameters and FLC membership functions’ range and scaling factors. The optimization function is modeled as a multi-objective problem comprising of frequency weighted RMS seat acceleration, Vibration dose value (VDV), RMS suspension space, and RMS tyre deflection. ISO 2631-1 standard is adopted to assess the ride and health criterion.</p><p>The nonlinear quarter model along with the controller is modeled and simulated and optimized in a Matlab/Simulink environment. It is observed that GA-optimized FLC gives better control as compared to PID and passive suspension system. Further simulations are validated on suspension system with seat and human model. Parameters under observation are frequency-weighted RMS head acceleration, VDV at the head, crest factor, and amplitude ratios at the head and upper torso?(AR_h and AR_ut). Simulation results are presented in time and frequency domain.</p><p>Simulation results show that GA-based FLC and PID controller gives better ride comfort and health criterion by reducing RMS head acceleration, VDV at the head, CF, and AR_h and AR_ut over passive suspension system.</p>","PeriodicalId":592,"journal":{"name":"International Journal of Mechanical and Materials Engineering","volume":"13 1","pages":""},"PeriodicalIF":3.4000,"publicationDate":"2018-11-22","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://sci-hub-pdf.com/10.1186/s40712-018-0096-8","citationCount":"21","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"International Journal of Mechanical and Materials Engineering","FirstCategoryId":"1085","ListUrlMain":"https://link.springer.com/article/10.1186/s40712-018-0096-8","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q2","JCRName":"MATERIALS SCIENCE, MULTIDISCIPLINARY","Score":null,"Total":0}
引用次数: 21
Abstract
The primary function of a suspension system is to isolate the vehicle body from road irregularities thus providing the ride comfort and to support the vehicle and provide stability. The suspension system has to perform conflicting requirements; hence, a passive suspension system is replaced by the active suspension system which can supply force to the system. Active suspension supplies energy to respond dynamically and achieve relative motion between body and wheel and thus improves the performance of suspension system.
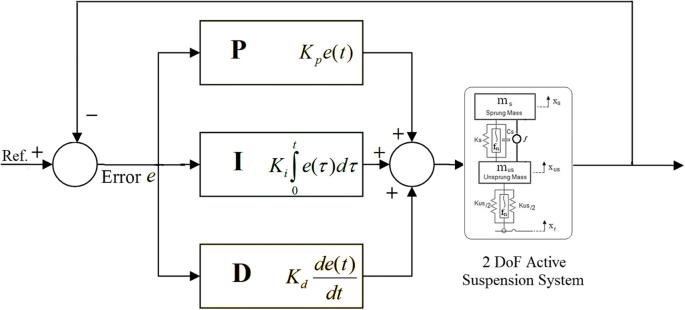
This study presents modelling and control optimization of a nonlinear quarter car suspension system. A mathematical model of nonlinear quarter car is developed and simulated for control and optimization in Matlab/Simulink? environment. Class C road is selected as input road condition with the vehicle traveling at 80?kmph. Active control of the suspension system is achieved using FLC and PID control actions. Instead of guessing and or trial and error method, genetic algorithm (GA)-based optimization algorithm is implemented to tune PID parameters and FLC membership functions’ range and scaling factors. The optimization function is modeled as a multi-objective problem comprising of frequency weighted RMS seat acceleration, Vibration dose value (VDV), RMS suspension space, and RMS tyre deflection. ISO 2631-1 standard is adopted to assess the ride and health criterion.
The nonlinear quarter model along with the controller is modeled and simulated and optimized in a Matlab/Simulink environment. It is observed that GA-optimized FLC gives better control as compared to PID and passive suspension system. Further simulations are validated on suspension system with seat and human model. Parameters under observation are frequency-weighted RMS head acceleration, VDV at the head, crest factor, and amplitude ratios at the head and upper torso?(AR_h and AR_ut). Simulation results are presented in time and frequency domain.
Simulation results show that GA-based FLC and PID controller gives better ride comfort and health criterion by reducing RMS head acceleration, VDV at the head, CF, and AR_h and AR_ut over passive suspension system.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


