{"title":"Radial basis function-based exoskeleton robot controller development","authors":"SK Hasan","doi":"10.1049/csy2.12057","DOIUrl":null,"url":null,"abstract":"<p>The realisation of a model-based controller for a robot with a higher degree of freedom requires a substantial amount of computational power. A high-speed CPU is required to maintain a higher sampling rate. Multicore processors cannot boost the performance or reduce the execution time as the programs are sequentially structured. The neural network is a great tool to convert a sequentially structured program to an equivalent parallel architecture program. In this study, a radial basis function (RBF) neural network is developed for controlling 7 degrees of freedom of the human lower extremity exoskeleton robot. A realistic friction model is used for modelling joint friction. High trajectory tracking accuracies have been obtained. Evidence of computational efficiency has been observed. The stability analysis of the developed controller is presented. Analysis of variance is used to assess the controller's resilience to parameter variation. To show the effectiveness of the developed controller, a comparative study was performe between the developed RBF network-based controller and Sliding Mode Controller, Computed Torque Controller, Adaptive controller, Linear Quadratic Regulator and Model Reference Computed Torque Controller.</p>","PeriodicalId":34110,"journal":{"name":"IET Cybersystems and Robotics","volume":"4 3","pages":"228-250"},"PeriodicalIF":1.2000,"publicationDate":"2022-09-27","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://ietresearch.onlinelibrary.wiley.com/doi/epdf/10.1049/csy2.12057","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"IET Cybersystems and Robotics","FirstCategoryId":"1085","ListUrlMain":"https://onlinelibrary.wiley.com/doi/10.1049/csy2.12057","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
引用次数: 0
Abstract
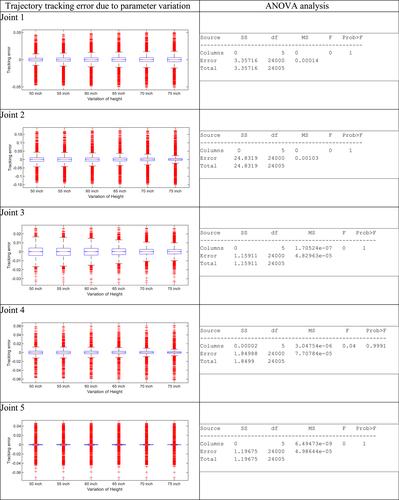
The realisation of a model-based controller for a robot with a higher degree of freedom requires a substantial amount of computational power. A high-speed CPU is required to maintain a higher sampling rate. Multicore processors cannot boost the performance or reduce the execution time as the programs are sequentially structured. The neural network is a great tool to convert a sequentially structured program to an equivalent parallel architecture program. In this study, a radial basis function (RBF) neural network is developed for controlling 7 degrees of freedom of the human lower extremity exoskeleton robot. A realistic friction model is used for modelling joint friction. High trajectory tracking accuracies have been obtained. Evidence of computational efficiency has been observed. The stability analysis of the developed controller is presented. Analysis of variance is used to assess the controller's resilience to parameter variation. To show the effectiveness of the developed controller, a comparative study was performe between the developed RBF network-based controller and Sliding Mode Controller, Computed Torque Controller, Adaptive controller, Linear Quadratic Regulator and Model Reference Computed Torque Controller.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


