{"title":"Full communication memory networks for team-level cooperation learning","authors":"Yutong Wang, Yizhuo Wang, Guillaume Sartoretti","doi":"10.1007/s10458-023-09617-6","DOIUrl":null,"url":null,"abstract":"<div><p>Communication in multi-agent systems is a key driver of team-level cooperation, for instance allowing individual agents to augment their knowledge about the world in partially-observable environments. In this paper, we propose two reinforcement learning-based multi-agent models, namely FCMNet and FCMTran. The two models both allow agents to simultaneously learn a differentiable communication mechanism that connects all agents as well as a common, cooperative policy conditioned upon received information. FCMNet utilizes multiple directional Long Short-Term Memory chains to sequentially transmit and encode the current observation-based messages sent by every other agent at each timestep. FCMTran further relies on the encoder of a modified transformer to simultaneously aggregate multiple self-generated messages sent by all agents at the previous timestep into a single message that is used in the current timestep. Results from evaluating our models on a challenging set of StarCraft II micromanagement tasks with shared rewards show that FCMNet and FCMTran both outperform recent communication-based methods and value decomposition methods in almost all tested StarCraft II micromanagement tasks. We further improve the performance of our models by combining them with value decomposition techniques; there, in particular, we show that FCMTran with value decomposition significantly pushes the state-of-the-art on one of the hardest benchmark tasks without any task-specific tuning. We also investigate the robustness of FCMNet under communication disturbances (i.e., binarized messages, random message loss, and random communication order) in an asymmetric collaborative pathfinding task with individual rewards, demonstrating FMCNet’s potential applicability in real-world robotic tasks.</p></div>","PeriodicalId":55586,"journal":{"name":"Autonomous Agents and Multi-Agent Systems","volume":"37 2","pages":""},"PeriodicalIF":2.6000,"publicationDate":"2023-08-07","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Autonomous Agents and Multi-Agent Systems","FirstCategoryId":"94","ListUrlMain":"https://link.springer.com/article/10.1007/s10458-023-09617-6","RegionNum":3,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
引用次数: 0
Abstract
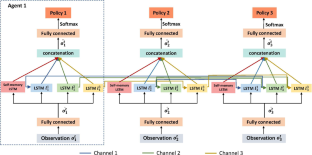
Communication in multi-agent systems is a key driver of team-level cooperation, for instance allowing individual agents to augment their knowledge about the world in partially-observable environments. In this paper, we propose two reinforcement learning-based multi-agent models, namely FCMNet and FCMTran. The two models both allow agents to simultaneously learn a differentiable communication mechanism that connects all agents as well as a common, cooperative policy conditioned upon received information. FCMNet utilizes multiple directional Long Short-Term Memory chains to sequentially transmit and encode the current observation-based messages sent by every other agent at each timestep. FCMTran further relies on the encoder of a modified transformer to simultaneously aggregate multiple self-generated messages sent by all agents at the previous timestep into a single message that is used in the current timestep. Results from evaluating our models on a challenging set of StarCraft II micromanagement tasks with shared rewards show that FCMNet and FCMTran both outperform recent communication-based methods and value decomposition methods in almost all tested StarCraft II micromanagement tasks. We further improve the performance of our models by combining them with value decomposition techniques; there, in particular, we show that FCMTran with value decomposition significantly pushes the state-of-the-art on one of the hardest benchmark tasks without any task-specific tuning. We also investigate the robustness of FCMNet under communication disturbances (i.e., binarized messages, random message loss, and random communication order) in an asymmetric collaborative pathfinding task with individual rewards, demonstrating FMCNet’s potential applicability in real-world robotic tasks.
期刊介绍:
This is the official journal of the International Foundation for Autonomous Agents and Multi-Agent Systems. It provides a leading forum for disseminating significant original research results in the foundations, theory, development, analysis, and applications of autonomous agents and multi-agent systems. Coverage in Autonomous Agents and Multi-Agent Systems includes, but is not limited to:
Agent decision-making architectures and their evaluation, including: cognitive models; knowledge representation; logics for agency; ontological reasoning; planning (single and multi-agent); reasoning (single and multi-agent)
Cooperation and teamwork, including: distributed problem solving; human-robot/agent interaction; multi-user/multi-virtual-agent interaction; coalition formation; coordination
Agent communication languages, including: their semantics, pragmatics, and implementation; agent communication protocols and conversations; agent commitments; speech act theory
Ontologies for agent systems, agents and the semantic web, agents and semantic web services, Grid-based systems, and service-oriented computing
Agent societies and societal issues, including: artificial social systems; environments, organizations and institutions; ethical and legal issues; privacy, safety and security; trust, reliability and reputation
Agent-based system development, including: agent development techniques, tools and environments; agent programming languages; agent specification or validation languages
Agent-based simulation, including: emergent behavior; participatory simulation; simulation techniques, tools and environments; social simulation
Agreement technologies, including: argumentation; collective decision making; judgment aggregation and belief merging; negotiation; norms
Economic paradigms, including: auction and mechanism design; bargaining and negotiation; economically-motivated agents; game theory (cooperative and non-cooperative); social choice and voting
Learning agents, including: computational architectures for learning agents; evolution, adaptation; multi-agent learning.
Robotic agents, including: integrated perception, cognition, and action; cognitive robotics; robot planning (including action and motion planning); multi-robot systems.
Virtual agents, including: agents in games and virtual environments; companion and coaching agents; modeling personality, emotions; multimodal interaction; verbal and non-verbal expressiveness
Significant, novel applications of agent technology
Comprehensive reviews and authoritative tutorials of research and practice in agent systems
Comprehensive and authoritative reviews of books dealing with agents and multi-agent systems.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


