[A decision framework for an adaptive behavioral intervention for physical activity using hybrid model predictive control: illustration with Just Walk].
Daniel Cevallos, César A Martín, Mohamed El Mistiri, Daniel E Rivera, Eric Hekler
{"title":"[A decision framework for an adaptive behavioral intervention for physical activity using hybrid model predictive control: illustration with <i>Just Walk</i>].","authors":"Daniel Cevallos, César A Martín, Mohamed El Mistiri, Daniel E Rivera, Eric Hekler","doi":"10.4995/riai.2022.16798","DOIUrl":null,"url":null,"abstract":"<p><p>Physical inactivity is a major contributor to morbidity and mortality worldwide. Many current physical activity behavioral interventions have shown limited success addressing the problem from a long-term perspective that includes maintenance. This paper proposes the design of a decision algorithm for a mobile and wireless health (mHealth) adaptive intervention that is based on control engineering concepts. The design process relies on a behavioral dynamical model based on Social Cognitive Theory (SCT), with a controller formulation based on hybrid model predictive control (HMPC) being used to implement the decision scheme. The discrete and logical features of HMPC coincide naturally with the categorical nature of the intervention components and the logical decisions that are particular to an intervention for physical activity. The intervention incorporates an online controller reconfiguration mode that applies changes in the penalty weights to accomplish the transition between the behavioral initiation and maintenance training stages. Controller performance is illustrated using an ARX model estimated from system identification data of a representative participant for <i>Just Walk</i>, a physical activity intervention designed on the basis of control systems principles.</p>","PeriodicalId":54463,"journal":{"name":"Revista Iberoamericana De Automatica E Informatica Industrial","volume":"19 3","pages":"297-308"},"PeriodicalIF":1.2000,"publicationDate":"2022-06-29","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://ftp.ncbi.nlm.nih.gov/pub/pmc/oa_pdf/78/72/nihms-1804923.PMC9439616.pdf","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Revista Iberoamericana De Automatica E Informatica Industrial","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.4995/riai.2022.16798","RegionNum":4,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2022/4/27 0:00:00","PubModel":"Epub","JCR":"Q4","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
引用次数: 0
Abstract
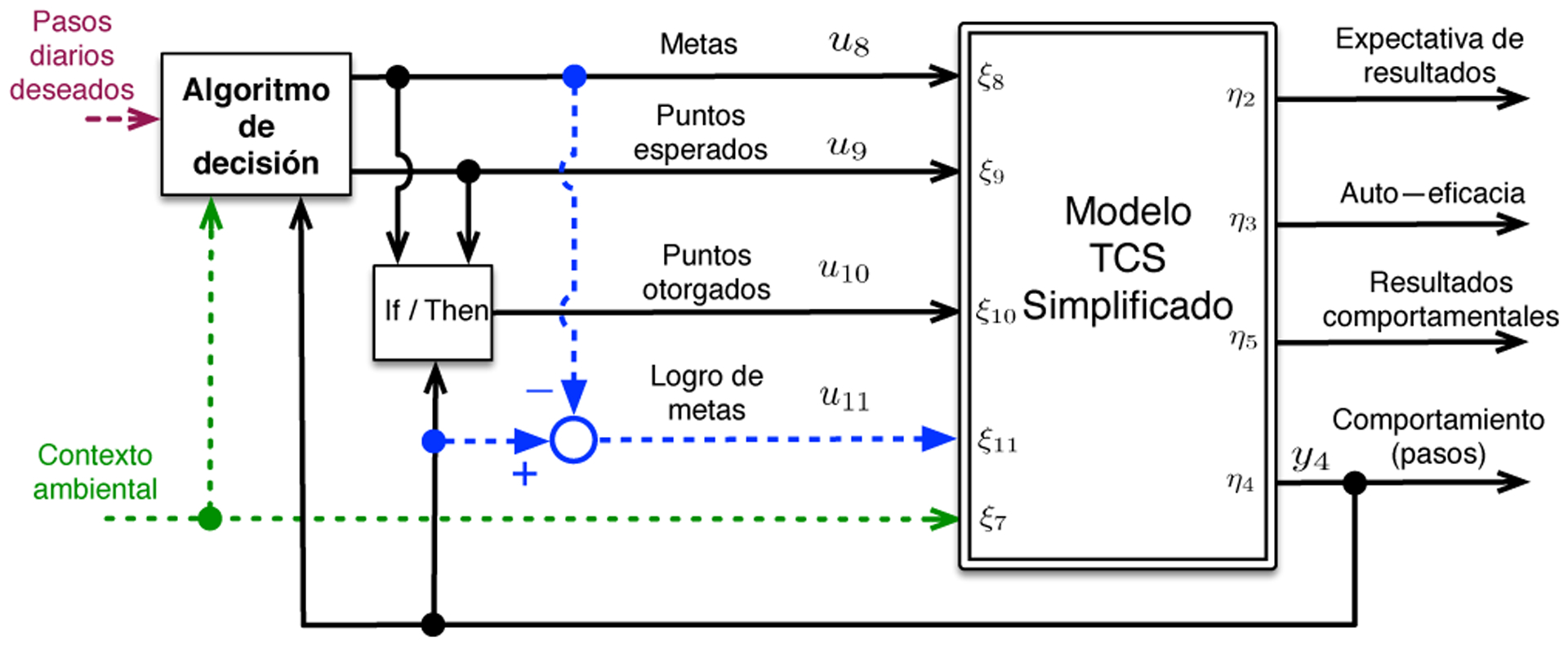
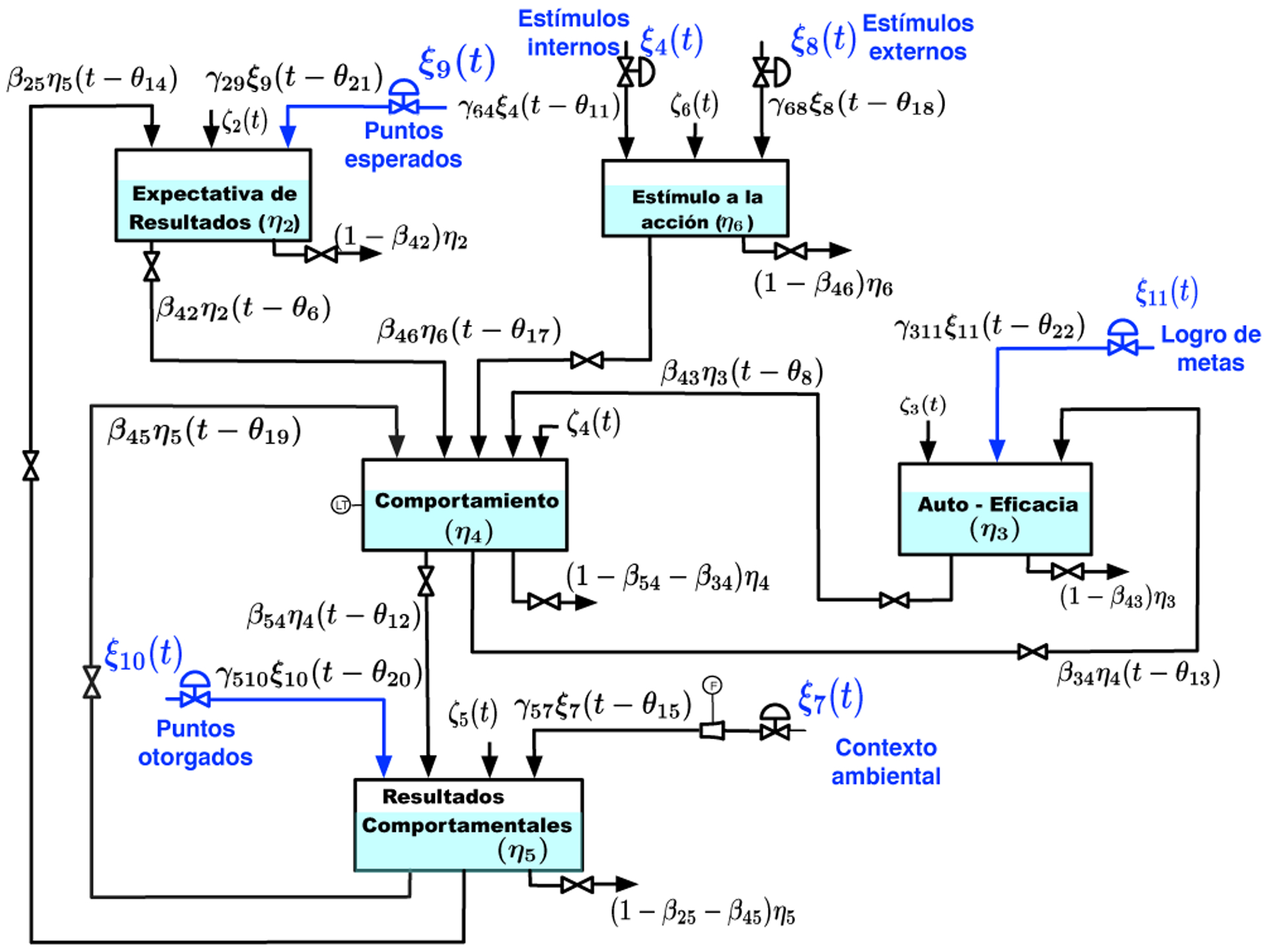
Physical inactivity is a major contributor to morbidity and mortality worldwide. Many current physical activity behavioral interventions have shown limited success addressing the problem from a long-term perspective that includes maintenance. This paper proposes the design of a decision algorithm for a mobile and wireless health (mHealth) adaptive intervention that is based on control engineering concepts. The design process relies on a behavioral dynamical model based on Social Cognitive Theory (SCT), with a controller formulation based on hybrid model predictive control (HMPC) being used to implement the decision scheme. The discrete and logical features of HMPC coincide naturally with the categorical nature of the intervention components and the logical decisions that are particular to an intervention for physical activity. The intervention incorporates an online controller reconfiguration mode that applies changes in the penalty weights to accomplish the transition between the behavioral initiation and maintenance training stages. Controller performance is illustrated using an ARX model estimated from system identification data of a representative participant for Just Walk, a physical activity intervention designed on the basis of control systems principles.
期刊介绍:
La Revista Iberoamericana de Automática e Informática Industrial (RIAI) es el órgano de expresión del Comité Español de Automática (CEA), miembro de la Federación Internacional de Control Automático (IFAC). La revista se desarrolla en el marco de la comunidad iberoamericana, y en general, en los entornos en los que el español constituye el idioma básico y no excluyente de comunicación. RIAI engloba las siguientes temáticas:
• Teoría de control y sistemas.
• Ingeniería de control de procesos e instrumentación.
• Técnicas de control avanzado.
• Automatización y control de sistemas de producción.
• Robótica y sistemas robotizados.
• Arquitecturas de control y tecnología de computadores aplicada al control automático de sistemas.
• Sistemas de tiempo real e informática industrial aplicados al control automático de sistemas.
• Filtrado, estimación y análisis y tratamiento de señales e imágenes aplicados al control automático de sistemas.
• Visión por computador aplicada al control automático de sistemas.
• Modelado, identificación, simulación y optimización de sistemas.
• Inteligencia computacional y técnicas de supervisión y detección de fallos aplicados al control automático de sistemas.
• Historia de la automática. La automática en sistemas sociales, económicos y empresariales.
• Cuestiones docentes y de formación en automática.
• Control de sistemas en red y complejos a gran escala.
• Control automático de procesos industriales, sistemas energéticos, mineros, ingeniería civil y edificios.
• Control automático de sistemas de transporte y vehículos.
• Control automático en bioingeniería, biología, agricultura, ecología y medicina.
• Control automático de máquinas y motores y mecatrónica.


 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


