Parametrized topological complexity of poset-stratified spaces.
Journal of applied and computational topology
Pub Date : 2022-01-01
Epub Date: 2021-12-18
DOI:10.1007/s41468-021-00085-z
引用次数: 1
Abstract
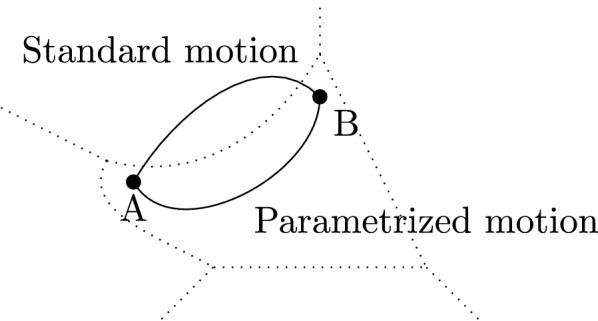
In this paper, parametrized motion planning algorithms for a fiberwise space over a poset P are studied. Such an algorithm assigns paths in a space X decomposed into subspaces with the index set P, that do not cross the boundaries of the separated regions. We compute the parametrized topological complexity of , which is one less than the minimal number of local parametrized motion planning algorithms used for designing non-cross-border robot motions in X.
后分层空间的参数化拓扑复杂度。
本文研究了光纤空间X→P在偏序集P上的参数化运动规划算法。该算法在空间X分解为索引集P的子空间中分配路径,且路径不跨越分离区域的边界。我们计算了X→P的参数化拓扑复杂度,它比X中用于设计非跨界机器人运动的局部参数化运动规划算法的最小数量少1。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


