{"title":"Autonomy in Rehabilitation Robotics: An Intersection.","authors":"Brenna D Argall","doi":"10.1146/annurev-control-061417-041727","DOIUrl":null,"url":null,"abstract":"<p><p>Within the field of human rehabilitation, robotic machines are used both to rehabilitate the body and to perform functional tasks. Robotics autonomy able to perceive the external world and reason about high-level control decisions, however, seldom is present in these machines. For functional tasks in particular, autonomy could help to decrease the operational burden on the human and perhaps even to increase access-and this potential only grows as human motor impairments become more severe. There are however serious, and often subtle, considerations to introducing clinically-feasible robotics autonomy to rehabilitation robots and machines. Today the fields of robotics autonomy and rehabilitation robotics are largely separate. The topic of this article is at the intersection of these fields: the introduction of clinically-feasible autonomy solutions to rehabilitation robots, and opportunities for autonomy within the rehabilitation domain.</p>","PeriodicalId":29961,"journal":{"name":"Annual Review of Control Robotics and Autonomous Systems","volume":"1 ","pages":"441-463"},"PeriodicalIF":14.0000,"publicationDate":"2018-05-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC8313033/pdf/nihms-1646639.pdf","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Annual Review of Control Robotics and Autonomous Systems","FirstCategoryId":"94","ListUrlMain":"https://doi.org/10.1146/annurev-control-061417-041727","RegionNum":1,"RegionCategory":"计算机科学","ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q1","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
引用次数: 0
Abstract
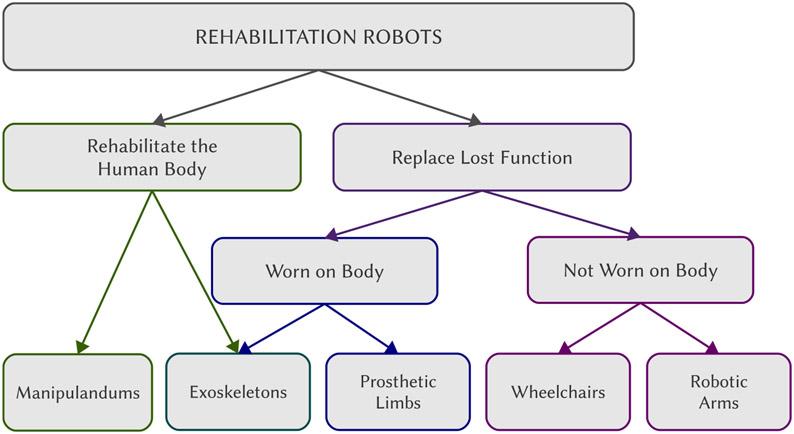
Within the field of human rehabilitation, robotic machines are used both to rehabilitate the body and to perform functional tasks. Robotics autonomy able to perceive the external world and reason about high-level control decisions, however, seldom is present in these machines. For functional tasks in particular, autonomy could help to decrease the operational burden on the human and perhaps even to increase access-and this potential only grows as human motor impairments become more severe. There are however serious, and often subtle, considerations to introducing clinically-feasible robotics autonomy to rehabilitation robots and machines. Today the fields of robotics autonomy and rehabilitation robotics are largely separate. The topic of this article is at the intersection of these fields: the introduction of clinically-feasible autonomy solutions to rehabilitation robots, and opportunities for autonomy within the rehabilitation domain.
期刊介绍:
The Annual Review of Control, Robotics, and Autonomous Systems offers comprehensive reviews on theoretical and applied developments influencing autonomous and semiautonomous systems engineering. Major areas covered include control, robotics, mechanics, optimization, communication, information theory, machine learning, computing, and signal processing. The journal extends its reach beyond engineering to intersect with fields like biology, neuroscience, and human behavioral sciences. The current volume has transitioned to open access through the Subscribe to Open program, with all articles published under a CC BY license.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


