{"title":"Characterizing dynamic behaviors of three-particle paramagnetic microswimmer near a solid surface.","authors":"Qianqian Wang, Lidong Yang, Jiangfan Yu, Li Zhang","doi":"10.1186/s40638-017-0076-0","DOIUrl":null,"url":null,"abstract":"<p><p>Particle-based magnetically actuated microswimmers have the potential to act as microrobotic tools for biomedical applications. In this paper, we report the dynamic behaviors of a three-particle paramagnetic microswimmer. Actuated by a rotating magnetic field with different frequencies, the microswimmer exhibits simple rotation and propulsion. When the input frequency is below 8 Hz, it exhibits simple rotation on the substrate, whereas it shows propulsion with varied poses when subjected to a frequency between 8 and 15 Hz. Furthermore, a solid surface that enhances swimming velocity was observed as the microswimmer is actuated near a solid surface. Our simulation results testify that the surface-enhanced swimming near a solid surface is because of the induced pressure difference in the surrounding fluid of the microagent.</p>","PeriodicalId":90966,"journal":{"name":"Robotics and biomimetics","volume":"4 1","pages":"20"},"PeriodicalIF":0.0000,"publicationDate":"2017-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://sci-hub-pdf.com/10.1186/s40638-017-0076-0","citationCount":"8","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Robotics and biomimetics","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.1186/s40638-017-0076-0","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2017/11/16 0:00:00","PubModel":"Epub","JCR":"","JCRName":"","Score":null,"Total":0}
引用次数: 8
Abstract
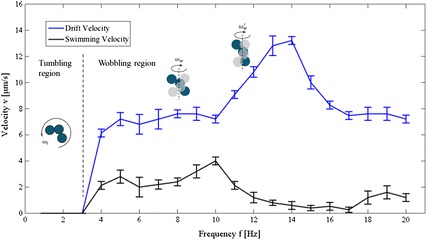
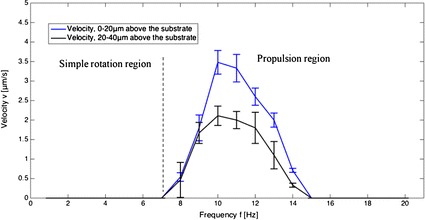
Particle-based magnetically actuated microswimmers have the potential to act as microrobotic tools for biomedical applications. In this paper, we report the dynamic behaviors of a three-particle paramagnetic microswimmer. Actuated by a rotating magnetic field with different frequencies, the microswimmer exhibits simple rotation and propulsion. When the input frequency is below 8 Hz, it exhibits simple rotation on the substrate, whereas it shows propulsion with varied poses when subjected to a frequency between 8 and 15 Hz. Furthermore, a solid surface that enhances swimming velocity was observed as the microswimmer is actuated near a solid surface. Our simulation results testify that the surface-enhanced swimming near a solid surface is because of the induced pressure difference in the surrounding fluid of the microagent.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


