Ryan T Willing, Masao Nishiwaki, James A Johnson, Graham J W King, George S Athwal
{"title":"Evaluation of a computational model to predict elbow range of motion.","authors":"Ryan T Willing, Masao Nishiwaki, James A Johnson, Graham J W King, George S Athwal","doi":"10.3109/10929088.2014.886083","DOIUrl":null,"url":null,"abstract":"<p><p>Computer models capable of predicting elbow flexion and extension range of motion (ROM) limits would be useful for assisting surgeons in improving the outcomes of surgical treatment of patients with elbow contractures. A simple and robust computer-based model was developed that predicts elbow joint ROM using bone geometries calculated from computed tomography image data. The model assumes a hinge-like flexion-extension axis, and that elbow passive ROM limits can be based on terminal bony impingement. The model was validated against experimental results with a cadaveric specimen, and was able to predict the flexion and extension limits of the intact joint to 0° and 3°, respectively. The model was also able to predict the flexion and extension limits to 1° and 2°, respectively, when simulated osteophytes were inserted into the joint. Future studies based on this approach will be used for the prediction of elbow flexion-extension ROM in patients with primary osteoarthritis to help identify motion-limiting hypertrophic osteophytes, and will eventually permit real-time computer-assisted navigated excisions.</p>","PeriodicalId":50644,"journal":{"name":"Computer Aided Surgery","volume":"19 4-6","pages":"57-63"},"PeriodicalIF":0.0000,"publicationDate":"2014-01-01","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://sci-hub-pdf.com/10.3109/10929088.2014.886083","citationCount":"9","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Computer Aided Surgery","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.3109/10929088.2014.886083","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2014/5/19 0:00:00","PubModel":"Epub","JCR":"Q","JCRName":"Medicine","Score":null,"Total":0}
引用次数: 9
Abstract
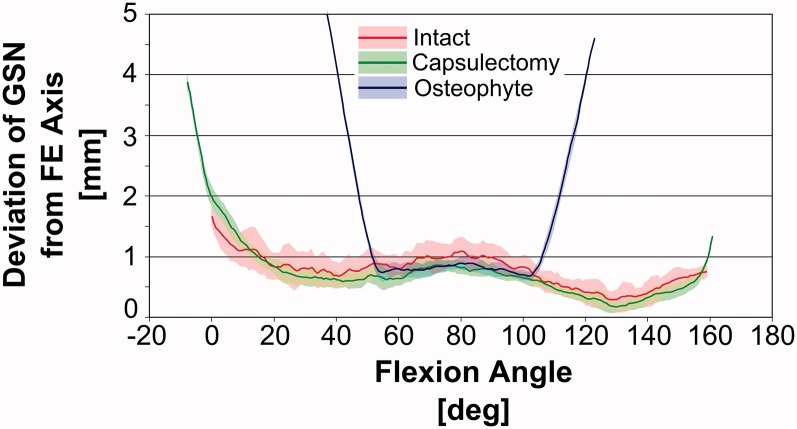
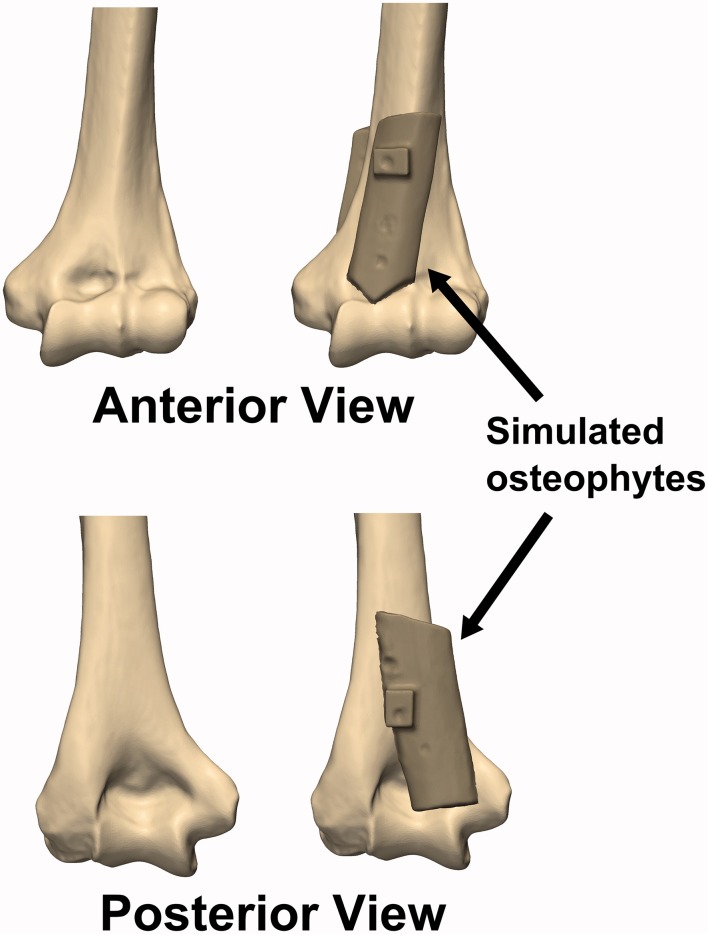
Computer models capable of predicting elbow flexion and extension range of motion (ROM) limits would be useful for assisting surgeons in improving the outcomes of surgical treatment of patients with elbow contractures. A simple and robust computer-based model was developed that predicts elbow joint ROM using bone geometries calculated from computed tomography image data. The model assumes a hinge-like flexion-extension axis, and that elbow passive ROM limits can be based on terminal bony impingement. The model was validated against experimental results with a cadaveric specimen, and was able to predict the flexion and extension limits of the intact joint to 0° and 3°, respectively. The model was also able to predict the flexion and extension limits to 1° and 2°, respectively, when simulated osteophytes were inserted into the joint. Future studies based on this approach will be used for the prediction of elbow flexion-extension ROM in patients with primary osteoarthritis to help identify motion-limiting hypertrophic osteophytes, and will eventually permit real-time computer-assisted navigated excisions.
期刊介绍:
The scope of Computer Aided Surgery encompasses all fields within surgery, as well as biomedical imaging and instrumentation, and digital technology employed as an adjunct to imaging in diagnosis, therapeutics, and surgery. Topics featured include frameless as well as conventional stereotaxic procedures, surgery guided by ultrasound, image guided focal irradiation, robotic surgery, and other therapeutic interventions that are performed with the use of digital imaging technology.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


