Tetsuya Goto, Takahiro Miyahara, Kazutaka Toyoda, Jun Okamoto, Yukinari Kakizawa, Jun-Ichi Koyama, Masakatsu G Fujie, Kazuhiro Hongo
{"title":"Telesurgery of Microscopic Micromanipulator System \"NeuRobot\" in Neurosurgery: Interhospital Preliminary Study.","authors":"Tetsuya Goto, Takahiro Miyahara, Kazutaka Toyoda, Jun Okamoto, Yukinari Kakizawa, Jun-Ichi Koyama, Masakatsu G Fujie, Kazuhiro Hongo","doi":"10.4137/jcnsd.s2552","DOIUrl":null,"url":null,"abstract":"<p><strong>Object: </strong>Robotic surgery can be applied as a novel technology. Our master-slave microscopic-micromanipulator system (NeuRobot), which has a rigid endoscope and three robot-arms, has been developed to perform neurosurgical procedures, and employed successfully in some clinical cases. Although the master and slave parts of NeuRobot are directly connected by wire, it is possible to separate each part and to apply it to telesurgery with some modifications. To evaluate feasibility of NeuRobot in telesurgery, some basic experiments were performed.</p><p><strong>Methods: </strong>The quality of telemedicine network system between Shinshu University and one of the affiliated hospitals, which was completely separated from other public network systems, was investigated. The communication delay was calculated from the transmitting and the receiving records in the computers set in each hospital. The relationship between the change in communication delay from the master part to the slave part of NeuRobot (0, 100, 300, 500 and 700 ms) respectively and feasibility of NeuRobot was investigated. The task performance time in each time changing group was compared. Feasibility of NeuRobot in telesurgical usage was evaluated. The master part and the slave part of NeuRobot placed in each hospital were connected through private network system. Interhospitally connected NeuRobot was compared with directly connected one in terms of task performance time.</p><p><strong>Results: </strong>Less than 1 ms was required for corresponding the data in a steady transmitting state. Within 2 seconds after connection, relative time delay (maximum 40 ms) and packet loss were sometimes observed. The mean task performance time was significantly longer in over 500 ms delayed group compared with directly connected NeuRobot. There was no significant difference in the task performance time between directly connected NeuRobot and interhospitally connected NeuRobot.</p><p><strong>Conclusion: </strong>Our results proved that telesurgical usage of NeuRobot was feasible. Telesurgical usage of telecontrolled manipulator system is recommended for application in a private network system in order to reduce technical and ethical problems. Some technical innovations will bring breakthrough to the telemedicine field.</p>","PeriodicalId":89798,"journal":{"name":"Journal of brain disease","volume":"1 ","pages":"45-53"},"PeriodicalIF":0.0000,"publicationDate":"2009-07-17","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://sci-hub-pdf.com/10.4137/jcnsd.s2552","citationCount":"26","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Journal of brain disease","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.4137/jcnsd.s2552","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2009/1/1 0:00:00","PubModel":"Print","JCR":"","JCRName":"","Score":null,"Total":0}
引用次数: 26
Abstract
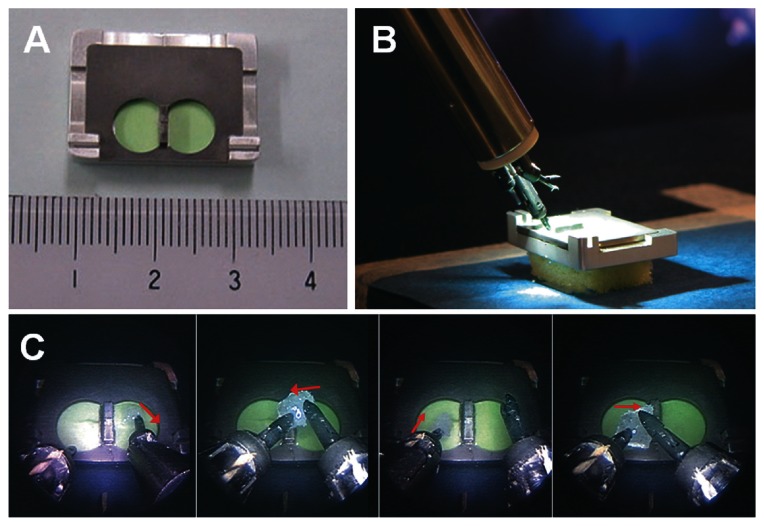
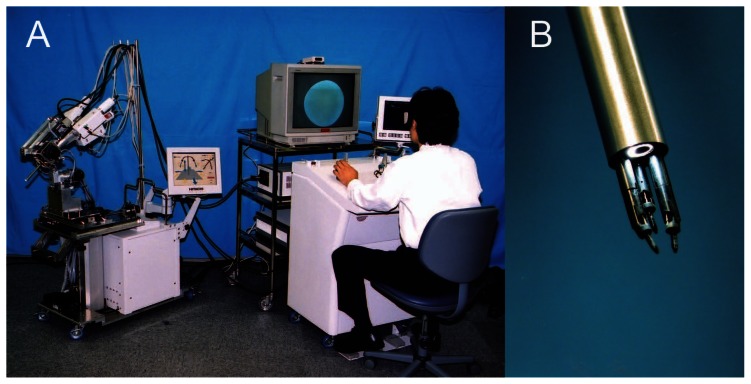
Object: Robotic surgery can be applied as a novel technology. Our master-slave microscopic-micromanipulator system (NeuRobot), which has a rigid endoscope and three robot-arms, has been developed to perform neurosurgical procedures, and employed successfully in some clinical cases. Although the master and slave parts of NeuRobot are directly connected by wire, it is possible to separate each part and to apply it to telesurgery with some modifications. To evaluate feasibility of NeuRobot in telesurgery, some basic experiments were performed.
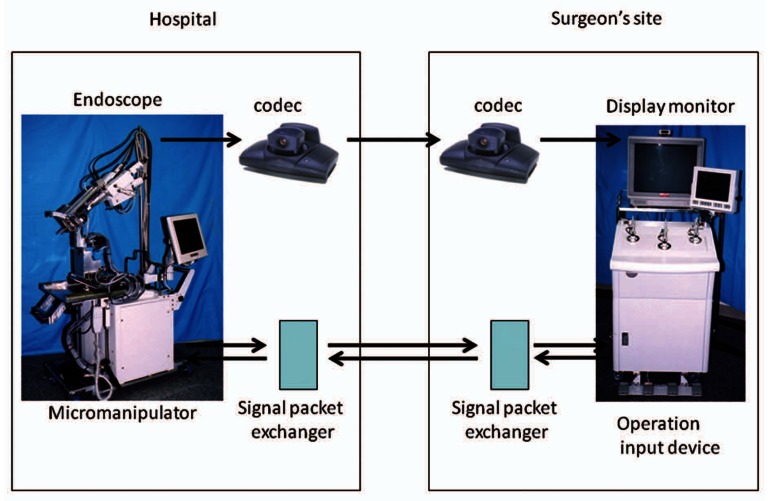
Methods: The quality of telemedicine network system between Shinshu University and one of the affiliated hospitals, which was completely separated from other public network systems, was investigated. The communication delay was calculated from the transmitting and the receiving records in the computers set in each hospital. The relationship between the change in communication delay from the master part to the slave part of NeuRobot (0, 100, 300, 500 and 700 ms) respectively and feasibility of NeuRobot was investigated. The task performance time in each time changing group was compared. Feasibility of NeuRobot in telesurgical usage was evaluated. The master part and the slave part of NeuRobot placed in each hospital were connected through private network system. Interhospitally connected NeuRobot was compared with directly connected one in terms of task performance time.
Results: Less than 1 ms was required for corresponding the data in a steady transmitting state. Within 2 seconds after connection, relative time delay (maximum 40 ms) and packet loss were sometimes observed. The mean task performance time was significantly longer in over 500 ms delayed group compared with directly connected NeuRobot. There was no significant difference in the task performance time between directly connected NeuRobot and interhospitally connected NeuRobot.
Conclusion: Our results proved that telesurgical usage of NeuRobot was feasible. Telesurgical usage of telecontrolled manipulator system is recommended for application in a private network system in order to reduce technical and ethical problems. Some technical innovations will bring breakthrough to the telemedicine field.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


