Fuzzy fixed-time multi-source fusion with attention-based neural networks for reliable navigation under satellite signal loss
IF 8
2区 计算机科学
Q1 AUTOMATION & CONTROL SYSTEMS
Engineering Applications of Artificial Intelligence
Pub Date : 2025-10-21
DOI:10.1016/j.engappai.2025.112806
引用次数: 0
Abstract
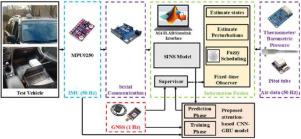
Accurate and reliable navigation is critical for autonomous systems, particularly in environments with sensor errors, unknown dynamic variations, global navigation satellite system (GNSS) outages, and complex maneuvers. This paper presents an innovative navigation framework that combines an adaptive observer with fixed-time convergence and a deep learning model based on an attention-equipped convolutional neural network (CNN) and a gated recurrent unit (GRU) with conditional fusion of air-data sensors in both GNSS-available and GNSS-denied conditions. At the core of the system lies a nonlinear observer with theoretical guarantees for fixed-time convergence, capable of estimating both the system state and perturbations independently of initial conditions. To enhance resilience against noise, sensor drift, and the limitations of low-cost inertial measurement units (IMUs), a fuzzy logic-based mechanism is employed to adaptively adjust observer gains using the normalized estimation error and its variance. During GNSS outages, the deep learning predictor — based on CNN and GRU with an attention mechanism — is used to estimate horizontal position changes from IMU data. Convolutional neural network layers extract local features, GRU layers capture temporal dependencies, and the attention mechanism prioritizes informative segments, enabling accurate and reliable predictions. In addition, a conditional sensor fusion strategy is proposed, which selectively utilizes pitot tube velocity and barometric altitude only during GNSS-denied phases, effectively mitigating the drift of the strap-down inertial navigation system (SINS). Field experiments across complex trajectories — including several GNSS interruptions — demonstrate that the proposed hybrid artificial intelligence-based framework offers improved estimation accuracy and real-time autonomous navigation in challenging real-world environments.
基于注意力神经网络的模糊定时多源融合在卫星信号丢失情况下的可靠导航
准确可靠的导航对于自主系统至关重要,特别是在传感器误差、未知动态变化、全球导航卫星系统(GNSS)中断和复杂机动的环境中。本文提出了一种创新的导航框架,该框架结合了具有固定时间收敛的自适应观测器和基于配备注意力的卷积神经网络(CNN)和门控循环单元(GRU)的深度学习模型,该模型在gnss可用和gnss拒绝条件下都具有空气数据传感器的条件融合。系统的核心是一个非线性观测器,它具有固定时间收敛的理论保证,能够独立于初始条件估计系统状态和扰动。为了增强对噪声、传感器漂移和低成本惯性测量单元(imu)局限性的弹性,采用一种基于模糊逻辑的机制,利用归一化估计误差及其方差自适应调整观测器增益。在GNSS中断期间,使用基于CNN和GRU的深度学习预测器(带注意机制)来估计IMU数据的水平位置变化。卷积神经网络层提取局部特征,GRU层捕获时间依赖性,注意力机制优先考虑信息片段,从而实现准确可靠的预测。此外,提出了一种条件传感器融合策略,该策略只在拒绝gnss的阶段选择性地利用皮托管速度和气压高度,有效地减轻捷联惯性导航系统的漂移。在复杂轨迹上的现场实验(包括几次GNSS中断)表明,所提出的基于人工智能的混合框架在具有挑战性的现实环境中提供了更高的估计精度和实时自主导航。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Engineering Applications of Artificial Intelligence
工程技术-工程:电子与电气
CiteScore
9.60
自引率
10.00%
发文量
505
审稿时长
68 days
期刊介绍:
Artificial Intelligence (AI) is pivotal in driving the fourth industrial revolution, witnessing remarkable advancements across various machine learning methodologies. AI techniques have become indispensable tools for practicing engineers, enabling them to tackle previously insurmountable challenges. Engineering Applications of Artificial Intelligence serves as a global platform for the swift dissemination of research elucidating the practical application of AI methods across all engineering disciplines. Submitted papers are expected to present novel aspects of AI utilized in real-world engineering applications, validated using publicly available datasets to ensure the replicability of research outcomes. Join us in exploring the transformative potential of AI in engineering.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


