Optimizing hip exoskeleton assistance pattern based on machine learning and simulation algorithms: a personalized approach to metabolic cost reduction.
Arash Mohammadzadeh Gonabadi, Iraklis I Pipinos, Sara A Myers, Farahnaz Fallahtafti
{"title":"Optimizing hip exoskeleton assistance pattern based on machine learning and simulation algorithms: a personalized approach to metabolic cost reduction.","authors":"Arash Mohammadzadeh Gonabadi, Iraklis I Pipinos, Sara A Myers, Farahnaz Fallahtafti","doi":"10.3389/frobt.2025.1669600","DOIUrl":null,"url":null,"abstract":"<p><strong>Introduction: </strong>Hip exoskeletons can lower the metabolic cost of walking in many tasks and populations, but their assistance patterns must be tailored to each user. We developed a simulation-based, human-in-the-loop (HIL) optimization framework combining machine learning (ML) and global optimization to personalize hip exoskeleton assistance patterns.</p><p><strong>Methods: </strong>Using data from ten healthy adults, we trained a Gradient Boosting (GB) surrogate model to predict normalized metabolic cost as a function of Peak Magnitude and End Timing of assistive torque. GB achieved the lowest relative absolute error percentage (RAEP) of 0.66%, outperforming Random Forest (RAEP = 0.83%) and Support Vector Regression (RAEP = 0.98%) among nine ML models. We then evaluated seven optimization algorithms, including Covariance Matrix Adaptation Evolution Strategy, Bayesian Optimization, Exploitative Bayesian Optimization, Cross-Entropy, Genetic Algorithm, Gravitational Search Algorithm (GSA), and Particle Swarm Optimization (PSO), to identify optimal assistance profiles.</p><p><strong>Results: </strong>GSA predicted the lowest metabolic cost (-1.06), equivalent to an estimated 53% reduction relative to no exoskeleton assistance, while PSO showed the highest efficiency (AUC = 0.24).</p><p><strong>Discussion: </strong>These simulated predictions, though not empirical measurements, demonstrate the framework's ability to streamline algorithm selection, reduce experimental burden, and accelerate translation of exoskeleton optimization into rehabilitation, occupational, and performance enhancement applications with broader biomechanical and clinical impact.</p>","PeriodicalId":47597,"journal":{"name":"Frontiers in Robotics and AI","volume":"12 ","pages":"1669600"},"PeriodicalIF":3.0000,"publicationDate":"2025-09-24","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12504096/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Robotics and AI","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.3389/frobt.2025.1669600","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q2","JCRName":"ROBOTICS","Score":null,"Total":0}
引用次数: 0
Abstract
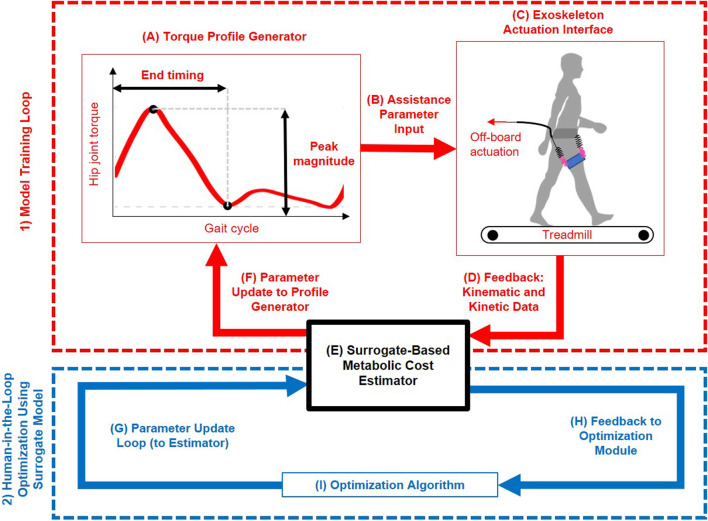
Introduction: Hip exoskeletons can lower the metabolic cost of walking in many tasks and populations, but their assistance patterns must be tailored to each user. We developed a simulation-based, human-in-the-loop (HIL) optimization framework combining machine learning (ML) and global optimization to personalize hip exoskeleton assistance patterns.
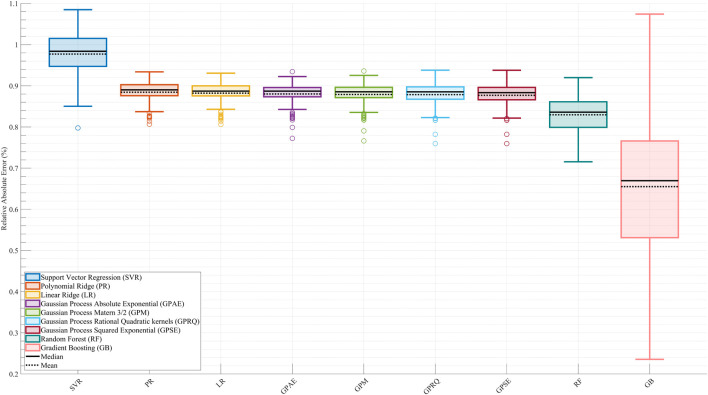
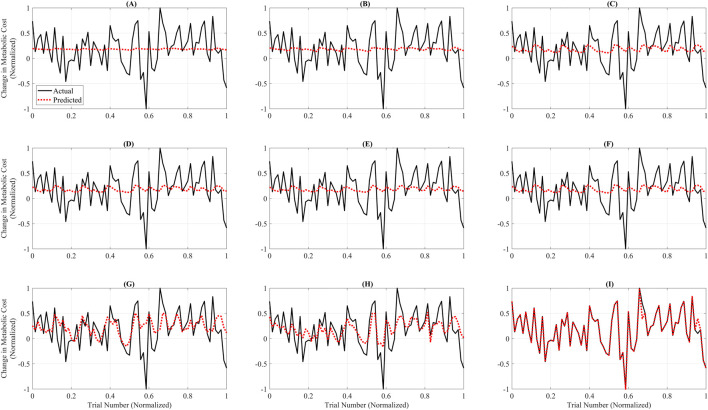
Methods: Using data from ten healthy adults, we trained a Gradient Boosting (GB) surrogate model to predict normalized metabolic cost as a function of Peak Magnitude and End Timing of assistive torque. GB achieved the lowest relative absolute error percentage (RAEP) of 0.66%, outperforming Random Forest (RAEP = 0.83%) and Support Vector Regression (RAEP = 0.98%) among nine ML models. We then evaluated seven optimization algorithms, including Covariance Matrix Adaptation Evolution Strategy, Bayesian Optimization, Exploitative Bayesian Optimization, Cross-Entropy, Genetic Algorithm, Gravitational Search Algorithm (GSA), and Particle Swarm Optimization (PSO), to identify optimal assistance profiles.
Results: GSA predicted the lowest metabolic cost (-1.06), equivalent to an estimated 53% reduction relative to no exoskeleton assistance, while PSO showed the highest efficiency (AUC = 0.24).
Discussion: These simulated predictions, though not empirical measurements, demonstrate the framework's ability to streamline algorithm selection, reduce experimental burden, and accelerate translation of exoskeleton optimization into rehabilitation, occupational, and performance enhancement applications with broader biomechanical and clinical impact.
期刊介绍:
Frontiers in Robotics and AI publishes rigorously peer-reviewed research covering all theory and applications of robotics, technology, and artificial intelligence, from biomedical to space robotics.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


