LiDAR-IMU SLAM framework in autonomous modular bus docking systems
IF 16.4
引用次数: 0
Abstract
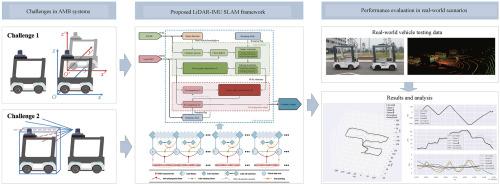
The Autonomous Modular Bus (AMB) introduces an innovative approach to public transportation by allowing modular buses to dock and undock seamlessly while in motion. This capability effectively alleviates traffic congestion and decreases energy usage through smoother and more efficient vehicle operation. However, achieving autonomous docking for AMBs poses significant challenges, including the need for precise localization in both horizontal and vertical dimensions and the ability to manage dynamic persistent obstacles in close-range scenarios. Existing Light Detection and Ranging (LiDAR)-based Simultaneous Localization and Mapping (SLAM) algorithms, such as LIO-SAM, perform well in static environments but encounter limitations in dynamic scenarios, particularly with occlusions and vertical drift during AMB docking. In this paper, we propose an enhanced LiDAR-Inertial Measurement Unit (IMU) SLAM framework focused on improving localization accuracy and robustness during AMB docking. Key contributions include: (1) A two-stage scan-to-map matching method with ground constraints to reduce z-axis drift; (2) A factor graph optimization strategy integrating IMU roll and pitch constraints and periodic resetting to mitigate long-term drift; (3) A deep learning-based front vehicle detection and point cloud filtering mechanism to reduce occlusion effects. Experimental evaluations on single-vehicle and dual-vehicle datasets demonstrate that our method significantly reduces Absolute Pose Error (APE) and Relative Pose Error (RPE) compared to existing methods. These results highlight the framework's ability to address the unique challenges of AMB docking, therefore helping alleviate traffic congestion and reduce energy consumption.
自主模块化公交对接系统中的LiDAR-IMU SLAM框架
自动模块化巴士(AMB)引入了一种创新的公共交通方式,允许模块化巴士在行驶过程中无缝停靠和卸载。这一功能有效地缓解了交通拥堵,并通过更平稳、更高效的车辆运行减少了能源消耗。然而,实现AMBs的自主对接面临着重大挑战,包括需要在水平和垂直维度上进行精确定位,以及在近距离场景中管理动态持久障碍物的能力。现有的基于光探测和测距(LiDAR)的同步定位和测绘(SLAM)算法,如LIO-SAM,在静态环境中表现良好,但在动态场景中会遇到限制,特别是在AMB对接过程中的遮挡和垂直漂移。本文提出了一种增强的激光雷达-惯性测量单元SLAM框架,旨在提高定位精度和AMB对接时的鲁棒性。主要贡献包括:(1)基于地面约束的两阶段扫描到地图匹配方法,以减少z轴漂移;(2)综合IMU横摇和俯仰约束和周期性复位的因子图优化策略,以缓解长期漂移;(3)基于深度学习的前方车辆检测和点云过滤机制,降低遮挡效应。在单车辆和双车辆数据集上的实验评估表明,与现有方法相比,我们的方法显著降低了绝对姿势误差(APE)和相对姿势误差(RPE)。这些结果突出了该框架解决AMB对接独特挑战的能力,从而有助于缓解交通拥堵和降低能源消耗。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


