{"title":"Walking Robot’s Getting Out from an Emergency Situation on Its Back","authors":"Yu. F. Golubev, V. V. Koryanov, E. V. Melkumova","doi":"10.3103/S0027133025700207","DOIUrl":null,"url":null,"abstract":"<p>A method of swinging of the six-legged robot to ensure its overturn from the upside-down position is proposed. As a support, we consider an inclined plane with a slight slope towards the flip, with a pit and optionally with a bump next to it. The support can be rotated sequentially around two different axes. It is shown that the overturn is possible with the help of cyclic movement of the group of legs if the body has an upper shell in the form of a truncated cylinder. The swinging is performed by the legs on the edge of the body opposite to the one through which the flip is to occur. An analytical study of the model problem was performed, along with a simulation of the full dynamics of the robot in contact with the support using the Universal Mechanism software package. Specifics of swinging due to the slope, the pit, and the bump are shown.</p>","PeriodicalId":710,"journal":{"name":"Moscow University Mechanics Bulletin","volume":"80 3","pages":"120 - 128"},"PeriodicalIF":0.7000,"publicationDate":"2025-09-22","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Moscow University Mechanics Bulletin","FirstCategoryId":"1085","ListUrlMain":"https://link.springer.com/article/10.3103/S0027133025700207","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"MECHANICS","Score":null,"Total":0}
引用次数: 0
Abstract
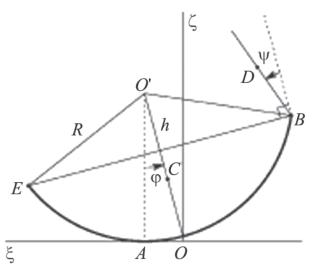
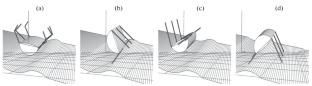
A method of swinging of the six-legged robot to ensure its overturn from the upside-down position is proposed. As a support, we consider an inclined plane with a slight slope towards the flip, with a pit and optionally with a bump next to it. The support can be rotated sequentially around two different axes. It is shown that the overturn is possible with the help of cyclic movement of the group of legs if the body has an upper shell in the form of a truncated cylinder. The swinging is performed by the legs on the edge of the body opposite to the one through which the flip is to occur. An analytical study of the model problem was performed, along with a simulation of the full dynamics of the robot in contact with the support using the Universal Mechanism software package. Specifics of swinging due to the slope, the pit, and the bump are shown.
期刊介绍:
Moscow University Mechanics Bulletin is the journal of scientific publications, reflecting the most important areas of mechanics at Lomonosov Moscow State University. The journal is dedicated to research in theoretical mechanics, applied mechanics and motion control, hydrodynamics, aeromechanics, gas and wave dynamics, theory of elasticity, theory of elasticity and mechanics of composites.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


