Ankle Exoskeletons in Walking and Load-Carrying Tasks: Insights into Biomechanics and Human-Robot Interaction
IF 4.2
4区 医学
Q1 ENGINEERING, BIOMEDICAL
引用次数: 0
Abstract
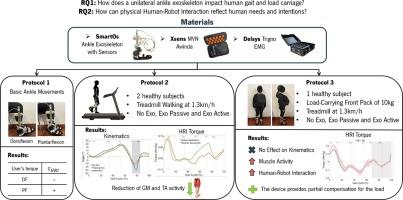
Background: Lower limb exoskeletons are in the focus of the scientific community due to their potential to enhance human quality of life across diverse scenarios. However, their widespread adoption remains limited by the lack of comprehensive frameworks to understand their biomechanical and human-robot interaction (HRI) impacts, which are essential for developing adaptive and personalized control strategies. To address this, understanding the exoskeleton's effects on kinematic, kinetic, and electromyographic signals, as well as HRI dynamics, is paramount to achieve improved usability of wearable robots. Objectives: This study aims to provide a systematic methodology to evaluate the impact of an ankle exoskeleton on human movement during walking and load-carrying (10 kg front pack) tasks, focusing on joint kinematics, muscle activity, and HRI torque signals. The methodology is designed to account for individual and device-specific factors, ensuring adaptability across users and exoskeletons. Materials and Methods: The study employed an inertial data acquisition system (Xsens MVN), electromyography (Delsys), and a unilateral ankle exoskeleton. Three complementary experiments were performed. The first examined basic dorsiflexion and plantarflexion movements. The second analysed the gait of two subjects without and with the device under passive and active assistance modes. The third investigated load-carrying tasks under the same assistance modes. Results and Conclusions: The first experiment confirmed that the HRI sensor captured both voluntary and involuntary torques, providing directional torque insights. The second experiment showed that the device slightly restricted ankle range of motion (RoM) but supported normal gait patterns across all assistance modes. The exoskeleton reduced muscle activity, particularly in active mode. HRI torque varied according to gait phases and highlighted reduced synchronisation, suggesting a need for improved support. The third experiment revealed that load-carrying increased GM and TA muscle activity, but the device partially mitigated user effort by reducing muscle activity compared to unassisted walking. HRI increased during load-carrying, providing insights into user-device dynamics. These results demonstrate the importance of tailoring exoskeleton evaluation methods to specific devices and users, while offering a framework for future studies on exoskeleton biomechanics and HRI.
踝关节外骨骼在行走和负重任务:洞察生物力学和人机交互
背景:下肢外骨骼因其在不同情况下提高人类生活质量的潜力而成为科学界关注的焦点。然而,由于缺乏全面的框架来理解它们的生物力学和人机交互(HRI)影响,它们的广泛采用仍然受到限制,这对于开发自适应和个性化控制策略至关重要。为了解决这个问题,了解外骨骼对运动学、动力学、肌电图信号以及HRI动力学的影响,对于提高可穿戴机器人的可用性至关重要。目的:本研究旨在提供一种系统的方法来评估踝关节外骨骼在行走和负重(负重10公斤)任务中对人体运动的影响,重点关注关节运动学、肌肉活动和HRI扭矩信号。该方法旨在考虑个人和设备特定因素,确保用户和外骨骼的适应性。材料和方法:研究采用惯性数据采集系统(Xsens MVN)、肌电图(Delsys)和单侧踝关节外骨骼。进行了三个补充实验。第一组检查了基本的背屈和跖屈运动。第二步分析了两名受试者在被动和主动辅助模式下的步态。第三个研究在相同的辅助模式下的负重任务。结果和结论:第一次实验证实,HRI传感器可以同时捕获主动扭矩和非主动扭矩,提供定向扭矩信息。第二个实验表明,该设备稍微限制了脚踝的活动范围,但在所有辅助模式下都支持正常的步态模式。外骨骼减少了肌肉活动,尤其是在活动模式下。HRI扭矩根据步态阶段而变化,并突出显示同步减少,表明需要改进支持。第三个实验显示,负重增加了GM和TA肌肉活动,但与无辅助行走相比,该设备通过减少肌肉活动部分减轻了使用者的努力。HRI在负载过程中增加,提供了对用户-设备动态的洞察。这些结果证明了针对特定设备和用户定制外骨骼评估方法的重要性,同时为外骨骼生物力学和HRI的未来研究提供了框架。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Irbm
ENGINEERING, BIOMEDICAL-
CiteScore
10.30
自引率
4.20%
发文量
81
审稿时长
57 days
期刊介绍:
IRBM is the journal of the AGBM (Alliance for engineering in Biology an Medicine / Alliance pour le génie biologique et médical) and the SFGBM (BioMedical Engineering French Society / Société française de génie biologique médical) and the AFIB (French Association of Biomedical Engineers / Association française des ingénieurs biomédicaux).
As a vehicle of information and knowledge in the field of biomedical technologies, IRBM is devoted to fundamental as well as clinical research. Biomedical engineering and use of new technologies are the cornerstones of IRBM, providing authors and users with the latest information. Its six issues per year propose reviews (state-of-the-art and current knowledge), original articles directed at fundamental research and articles focusing on biomedical engineering. All articles are submitted to peer reviewers acting as guarantors for IRBM''s scientific and medical content. The field covered by IRBM includes all the discipline of Biomedical engineering. Thereby, the type of papers published include those that cover the technological and methodological development in:
-Physiological and Biological Signal processing (EEG, MEG, ECG…)-
Medical Image processing-
Biomechanics-
Biomaterials-
Medical Physics-
Biophysics-
Physiological and Biological Sensors-
Information technologies in healthcare-
Disability research-
Computational physiology-
…
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


