{"title":"Open-Vocabulary Indoor Object Grounding with 3D Hierarchical Scene Graph","authors":"S. Linok, G. Naumov","doi":"10.3103/S1060992X25600673","DOIUrl":null,"url":null,"abstract":"<p>We propose <b>OVIGo-3DHSG</b> method—<b>O</b>pen-<b>V</b>ocabulary <b>I</b>ndoor <b>G</b>rounding of <b>o</b>bjects using <b>3D</b> <b>H</b>ierarchical <b>S</b>cene <b>G</b>raph. OVIGo-3DHSG represents an extensive indoor environment over a Hierarchical Scene Graph derived from sequences of RGB-D frames utilizing a set of open-vocabulary foundation models and sensor data processing. The hierarchical representation explicitly models spatial relations across floors, rooms, locations, and objects. To effectively address complex queries involving spatial reference to other objects, we integrate the hierarchical scene graph with a Large Language Model for multistep reasoning. This integration leverages inter-layer (e.g., room-to-object) and intra-layer (e.g., object-to-object) connections, enhancing spatial contextual understanding. We investigate the semantic and geometry accuracy of hierarchical representation on Habitat Matterport 3D Semantic multi-floor scenes. Our approach demonstrates efficient scene comprehension and robust object grounding compared to existing methods. Overall OVIGo-3DHSG demonstrates strong potential for applications requiring spatial reasoning and understanding of indoor environments. Related materials can be found at https://github.com/linukc/OVIGo-3DHSG.</p>","PeriodicalId":721,"journal":{"name":"Optical Memory and Neural Networks","volume":"34 3","pages":"323 - 333"},"PeriodicalIF":0.8000,"publicationDate":"2025-09-17","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Optical Memory and Neural Networks","FirstCategoryId":"1085","ListUrlMain":"https://link.springer.com/article/10.3103/S1060992X25600673","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q4","JCRName":"OPTICS","Score":null,"Total":0}
引用次数: 0
Abstract
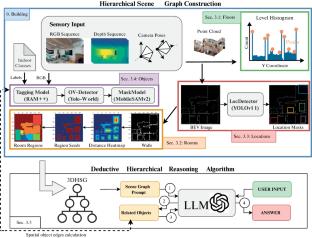
We propose OVIGo-3DHSG method—Open-Vocabulary Indoor Grounding of objects using 3DHierarchical Scene Graph. OVIGo-3DHSG represents an extensive indoor environment over a Hierarchical Scene Graph derived from sequences of RGB-D frames utilizing a set of open-vocabulary foundation models and sensor data processing. The hierarchical representation explicitly models spatial relations across floors, rooms, locations, and objects. To effectively address complex queries involving spatial reference to other objects, we integrate the hierarchical scene graph with a Large Language Model for multistep reasoning. This integration leverages inter-layer (e.g., room-to-object) and intra-layer (e.g., object-to-object) connections, enhancing spatial contextual understanding. We investigate the semantic and geometry accuracy of hierarchical representation on Habitat Matterport 3D Semantic multi-floor scenes. Our approach demonstrates efficient scene comprehension and robust object grounding compared to existing methods. Overall OVIGo-3DHSG demonstrates strong potential for applications requiring spatial reasoning and understanding of indoor environments. Related materials can be found at https://github.com/linukc/OVIGo-3DHSG.
期刊介绍:
The journal covers a wide range of issues in information optics such as optical memory, mechanisms for optical data recording and processing, photosensitive materials, optical, optoelectronic and holographic nanostructures, and many other related topics. Papers on memory systems using holographic and biological structures and concepts of brain operation are also included. The journal pays particular attention to research in the field of neural net systems that may lead to a new generation of computional technologies by endowing them with intelligence.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


