Detecting driver cognitive distraction in lane-change behavior: multi-source indicators from intention and execution phases
IF 4.4
2区 工程技术
Q1 PSYCHOLOGY, APPLIED
Transportation Research Part F-Traffic Psychology and Behaviour
Pub Date : 2025-09-09
DOI:10.1016/j.trf.2025.103343
引用次数: 0
Abstract
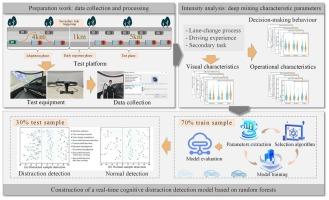
Lane changes are critical driving maneuvers that pose increased risk under cognitive distractions, thereby comprising operational safety. This study investigated the interaction between cognitive distraction and lane-change behavior using a driving simulator combined with eye-tracking technology, aiming to detect drivers’ distracted states prior to lane-change maneuvers. The lane-change process was divided into two phases: intention and execution. Visual and vehicle control data were collected from drivers with varying driving experience under three states: calculation, conversation and normal driving. The analysis revealed that cognitive distraction delayed lane-change intention, shortened the intention time window, and increased instability in distance judgment and driving decisions. Specifically, distracted drivers maintained a shorter distance to the lead vehicle at the generation moment of lane-change intention, as well as a reduced gap to the trailing vehicle at the execution phase starting point. Distraction also caused more rigid visual scanning patterns, impaired information processing efficiency, and degraded speed regulation and maneuver timing, resulting in longer lane-change durations and poorer lateral and longitudinal control. Inexperienced drivers performed worse under distraction compared to experienced drivers, showing more unstable control behaviors, which increased the risk of lane-change operations. Finally, a cognitive distraction detection model using a random forest algorithm combined with a sliding time window achieved an accuracy of 91.67% in distinguishing distraction samples during the intention phase and 95% before crossing the lane boundary. The proposed method demonstrates strong real-time capabilities and offers valuable insights for developing advanced lane-change assistance systems.
变道行为中驾驶员认知分心的检测:来自意图和执行阶段的多源指标
变道是一种关键的驾驶动作,在认知干扰下会增加风险,从而影响行车安全。本研究利用驾驶模拟器结合眼动追踪技术研究认知分心与变道行为之间的相互作用,旨在检测驾驶员在变道操作前的分心状态。变道过程分为两个阶段:意图和执行。在计算、对话和正常驾驶三种状态下,从不同驾驶经验的驾驶员收集视觉和车辆控制数据。分析发现,认知分心延迟了变道意图,缩短了变道意图时间窗,增加了距离判断和驾驶决策的不稳定性。其中,分心驾驶员在变道意图产生时刻与前车保持较短的距离,在执行阶段起点与尾随车辆的距离减小。分心还会导致视觉扫描模式更加僵化,信息处理效率受损,速度调节和机动时机下降,导致变道持续时间更长,横向和纵向控制能力下降。与经验丰富的司机相比,没有经验的司机在分心情况下表现更差,表现出更不稳定的控制行为,这增加了变道操作的风险。最后,采用随机森林算法结合滑动时间窗的认知分心检测模型在意图阶段识别分心样本的准确率为91.67%,在穿越车道边界之前识别分心样本的准确率为95%。该方法具有较强的实时性,为开发先进的变道辅助系统提供了有价值的见解。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

CiteScore
7.60
自引率
14.60%
发文量
239
审稿时长
71 days
期刊介绍:
Transportation Research Part F: Traffic Psychology and Behaviour focuses on the behavioural and psychological aspects of traffic and transport. The aim of the journal is to enhance theory development, improve the quality of empirical studies and to stimulate the application of research findings in practice. TRF provides a focus and a means of communication for the considerable amount of research activities that are now being carried out in this field. The journal provides a forum for transportation researchers, psychologists, ergonomists, engineers and policy-makers with an interest in traffic and transport psychology.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


