Brain–computer interface control with artificial intelligence copilots
IF 23.9
1区 计算机科学
Q1 COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE
引用次数: 0
Abstract
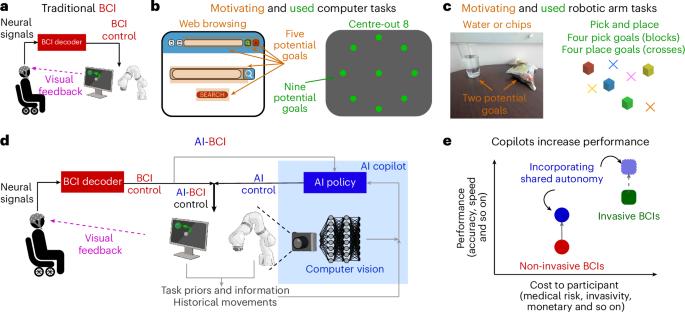
Motor brain–computer interfaces (BCIs) decode neural signals to help people with paralysis move and communicate. Even with important advances in the past two decades, BCIs face a key obstacle to clinical viability: BCI performance should strongly outweigh costs and risks. To significantly increase the BCI performance, we use shared autonomy, where artificial intelligence (AI) copilots collaborate with BCI users to achieve task goals. We demonstrate this AI-BCI in a non-invasive BCI system decoding electroencephalography signals. We first contribute a hybrid adaptive decoding approach using a convolutional neural network and ReFIT-like Kalman filter, enabling healthy users and a participant with paralysis to control computer cursors and robotic arms via decoded electroencephalography signals. We then design two AI copilots to aid BCI users in a cursor control task and a robotic arm pick-and-place task. We demonstrate AI-BCIs that enable a participant with paralysis to achieve 3.9-times-higher performance in target hit rate during cursor control and control a robotic arm to sequentially move random blocks to random locations, a task they could not do without an AI copilot. As AI copilots improve, BCIs designed with shared autonomy may achieve higher performance. AI copilots are integrated into brain–computer interfaces, enabling a paralysed participant to achieve improved control of computer cursors and robotic arms. This shared autonomy approach offers a promising path to increase BCI performance and clinical viability.
人工智能副驾驶的脑机接口控制
运动脑机接口(bci)解码神经信号,帮助瘫痪患者移动和交流。即使在过去二十年中取得了重要进展,脑机接口仍面临着临床可行性的关键障碍:脑机接口的性能应该远远超过成本和风险。为了显著提高BCI性能,我们使用了共享自主权,人工智能(AI)副驾驶与BCI用户协作以实现任务目标。我们在非侵入性脑机接口系统中展示了这种AI-BCI解码脑电图信号。我们首先提出了一种混合自适应解码方法,使用卷积神经网络和类似于refit的卡尔曼滤波器,使健康用户和瘫痪参与者能够通过解码的脑电图信号控制计算机光标和机械臂。然后,我们设计了两个人工智能副驾驶来帮助BCI用户完成光标控制任务和机械臂拾取和放置任务。我们演示了AI- bci,使瘫痪参与者在光标控制和控制机械臂顺序移动随机块到随机位置时的目标命中率提高了3.9倍,这是他们没有AI副驾驶无法完成的任务。随着人工智能副驾驶的改进,具有共享自主权的bci可能会获得更高的性能。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Nature Machine Intelligence
Multiple-
CiteScore
36.90
自引率
2.10%
发文量
127
期刊介绍:
Nature Machine Intelligence is a distinguished publication that presents original research and reviews on various topics in machine learning, robotics, and AI. Our focus extends beyond these fields, exploring their profound impact on other scientific disciplines, as well as societal and industrial aspects. We recognize limitless possibilities wherein machine intelligence can augment human capabilities and knowledge in domains like scientific exploration, healthcare, medical diagnostics, and the creation of safe and sustainable cities, transportation, and agriculture. Simultaneously, we acknowledge the emergence of ethical, social, and legal concerns due to the rapid pace of advancements.
To foster interdisciplinary discussions on these far-reaching implications, Nature Machine Intelligence serves as a platform for dialogue facilitated through Comments, News Features, News & Views articles, and Correspondence. Our goal is to encourage a comprehensive examination of these subjects.
Similar to all Nature-branded journals, Nature Machine Intelligence operates under the guidance of a team of skilled editors. We adhere to a fair and rigorous peer-review process, ensuring high standards of copy-editing and production, swift publication, and editorial independence.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


