Safe multi-channel communication for human–robot collaboration
IF 11.4
1区 计算机科学
Q1 COMPUTER SCIENCE, INTERDISCIPLINARY APPLICATIONS
引用次数: 0
Abstract
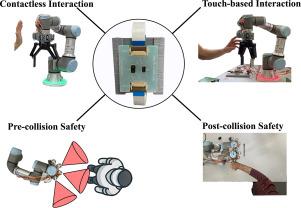
This paper presents a safe multi-channel communication and safety system for human–robot collaboration (HRC) in industrial applications enabled by the DiGeTac unit. This unit integrates gesture, distance, and custom-designed tactile sensors, with gesture and distance elements on the top and the tactile element on the bottom. This design provides enhanced multimodal safety and interaction, enabling both close proximity and long-distance perception, making the DiGeTac unit highly suitable for various collaborative scenarios. Unlike other multimodal sensors, DiGeTac offers contactless and touch-based interaction, and post- and pre-collision safety features for a broader range of tasks in HRC environments. The performance of each sensing element within the DiGeTac unit is thoroughly evaluated through a series of validation experiments with a robot arm. The distance sensor’s accuracy is assessed in pre-collision scenarios, ensuring reliable proximity detection for collision avoidance as part of the safety strategy. The tactile sensor is tested in a post-collision scenario, where it functions as a safety mechanism to detect impacts and trigger protective responses. The capability of hand gestures recognition to facilitate intuitive human–robot communication is evaluated using an artificial neural network (ANN). Additionally, the tactile sensor’s contact estimation is analysed with a convolutional neural network (CNN), enhancing the robot’s ability to interact with humans and perform collaborative tasks. Finally, both safety and interaction strategies are tested in HRC scenarios, where the human operator commands the robot to move to specific positions. The results show that the DiGeTac unit is effective and has potential to improve complex collaborative tasks.
面向人机协作的安全多通道通信
本文提出了一种安全的多通道通信和安全系统,用于工业应用中的人机协作(HRC)。该装置集成了手势、距离和定制设计的触觉传感器,手势和距离元素在顶部,触觉元素在底部。这种设计提供了增强的多模式安全性和交互性,可实现近距离和远距离感知,使DiGeTac单元非常适合各种协作场景。与其他多模态传感器不同,DiGeTac提供非接触式和基于触摸的交互,以及碰撞后和碰撞前的安全功能,可在HRC环境中执行更广泛的任务。DiGeTac单元内的每个传感元件的性能通过机械臂的一系列验证实验进行了全面评估。距离传感器的精度在碰撞前场景中进行评估,确保可靠的接近检测,以避免碰撞,作为安全策略的一部分。触觉传感器在碰撞后的场景中进行了测试,在那里它作为一种安全机制来检测碰撞并触发保护反应。利用人工神经网络(ANN)对手势识别促进人机直观交流的能力进行了评估。此外,使用卷积神经网络(CNN)分析触觉传感器的接触估计,增强机器人与人类互动和执行协作任务的能力。最后,在HRC场景中对安全和交互策略进行了测试,在HRC场景中,人类操作员命令机器人移动到特定位置。结果表明,DiGeTac单元是有效的,具有改善复杂协作任务的潜力。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

CiteScore
24.10
自引率
13.50%
发文量
160
审稿时长
50 days
期刊介绍:
The journal, Robotics and Computer-Integrated Manufacturing, focuses on sharing research applications that contribute to the development of new or enhanced robotics, manufacturing technologies, and innovative manufacturing strategies that are relevant to industry. Papers that combine theory and experimental validation are preferred, while review papers on current robotics and manufacturing issues are also considered. However, papers on traditional machining processes, modeling and simulation, supply chain management, and resource optimization are generally not within the scope of the journal, as there are more appropriate journals for these topics. Similarly, papers that are overly theoretical or mathematical will be directed to other suitable journals. The journal welcomes original papers in areas such as industrial robotics, human-robot collaboration in manufacturing, cloud-based manufacturing, cyber-physical production systems, big data analytics in manufacturing, smart mechatronics, machine learning, adaptive and sustainable manufacturing, and other fields involving unique manufacturing technologies.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


