Amy Quartaro, Joshua Moser, John Cooper, Erik Komendera
{"title":"Parametric modeling of deformable linear objects for robotic outfitting and maintenance of space systems.","authors":"Amy Quartaro, Joshua Moser, John Cooper, Erik Komendera","doi":"10.3389/frobt.2025.1565837","DOIUrl":null,"url":null,"abstract":"<p><p>Outfitting and maintenance are important to an in-space architecture consisting of long duration missions. During such missions, crew is not continuously present; robotic agents become essential to the construction, maintenance, and servicing of complicated space assets, requiring some degree of autonomy to plan and execute tasks. There has been significant research into manipulation planning for rigid elements for in-space assembly and servicing, but flexible electrical cables, which fall under the domain of Deformable Linear Objects (DLOs), have not received such attention despite being critical components of powered space systems. Cables often have a non-zero bend equilibrium configuration, which the majority of DLO research does not consider. This article implements a model-based optimization approach to estimate cable configuration, where a design parameter of the model's discretization level enables trading model accuracy vs computational complexity. Observed 2D cable configurations are used to improve the model via parameter estimation. The parameter estimation is validated through comparing predicted configurations based on estimated parameters to that of a real cable. The incorporation of parameter estimation to the cable model is shown to reduce prediction errors by an order of magnitude. The results of this work demonstrate some of the challenges present with robotic cable manipulation, exploring the complexities of outfitting and maintenance operations of in-space facilities, and puts forth a method for reducing the size of the state space of a cable payload while accounting for non-zero equilibrium configurations.</p>","PeriodicalId":47597,"journal":{"name":"Frontiers in Robotics and AI","volume":"12 ","pages":"1565837"},"PeriodicalIF":3.0000,"publicationDate":"2025-07-29","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12340519/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Robotics and AI","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.3389/frobt.2025.1565837","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q2","JCRName":"ROBOTICS","Score":null,"Total":0}
引用次数: 0
Abstract
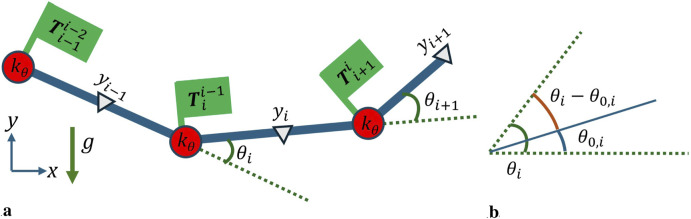
Outfitting and maintenance are important to an in-space architecture consisting of long duration missions. During such missions, crew is not continuously present; robotic agents become essential to the construction, maintenance, and servicing of complicated space assets, requiring some degree of autonomy to plan and execute tasks. There has been significant research into manipulation planning for rigid elements for in-space assembly and servicing, but flexible electrical cables, which fall under the domain of Deformable Linear Objects (DLOs), have not received such attention despite being critical components of powered space systems. Cables often have a non-zero bend equilibrium configuration, which the majority of DLO research does not consider. This article implements a model-based optimization approach to estimate cable configuration, where a design parameter of the model's discretization level enables trading model accuracy vs computational complexity. Observed 2D cable configurations are used to improve the model via parameter estimation. The parameter estimation is validated through comparing predicted configurations based on estimated parameters to that of a real cable. The incorporation of parameter estimation to the cable model is shown to reduce prediction errors by an order of magnitude. The results of this work demonstrate some of the challenges present with robotic cable manipulation, exploring the complexities of outfitting and maintenance operations of in-space facilities, and puts forth a method for reducing the size of the state space of a cable payload while accounting for non-zero equilibrium configurations.
期刊介绍:
Frontiers in Robotics and AI publishes rigorously peer-reviewed research covering all theory and applications of robotics, technology, and artificial intelligence, from biomedical to space robotics.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


