{"title":"Incentivising cooperation by judging a group's performance by its weakest member in neuroevolution and reinforcement learning.","authors":"Jory Schossau, Bamshad Shirmohammadi, Arend Hintze","doi":"10.3389/frobt.2025.1599676","DOIUrl":null,"url":null,"abstract":"<p><strong>Introduction: </strong>Autonomous agents increasingly interact within social domains such as customer service, transportation, and healthcare, often acting collectively on behalf of humans. In many of these scenarios, individually greedy strategies can diminish overall performance, exemplified by phenomena such as stop-and-go traffic congestion or network service disruptions due to competing interests. Thus, there is a growing need to develop decision-making strategies for autonomous agents that balance individual efficiency with group equitability.</p><p><strong>Methods: </strong>We propose a straightforward approach for rewarding groups of autonomous agents within evolutionary and reinforcement learning frameworks based explicitly on the performance of the weakest member of the group. Rather than optimizing each agent's individual rewards independently, we align incentives by using a \"weakest-link\" metric, thereby encouraging collective strategies that support equitable outcomes.</p><p><strong>Results: </strong>Our results demonstrate that this weakest-member reward system effectively promotes equitable behavior among autonomous agents. Agents evolve or learn to balance collective benefit with individual performance, resulting in fairer outcomes for the entire group. Notably, the introduced approach improves overall efficiency, as equitably-minded agents collectively achieve greater stability and higher individual outcomes than agents pursuing purely selfish strategies.</p><p><strong>Discussion: </strong>This methodology aligns closely with biological mechanisms observed in nature, specifically group-level selection and inclusive fitness theory. By tying the evolutionary and learning objectives to the group's weakest member, we mimic natural processes that favor cooperative and equitable behaviors. Our findings highlight the importance of incentive structures that consider the collective well-being to optimize both group fairness and individual agent success. Future research should explore how this reward framework generalizes across broader domains and more complex agent interactions.</p>","PeriodicalId":47597,"journal":{"name":"Frontiers in Robotics and AI","volume":"12 ","pages":"1599676"},"PeriodicalIF":3.0000,"publicationDate":"2025-07-25","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12331510/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Robotics and AI","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.3389/frobt.2025.1599676","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q2","JCRName":"ROBOTICS","Score":null,"Total":0}
引用次数: 0
Abstract
Introduction: Autonomous agents increasingly interact within social domains such as customer service, transportation, and healthcare, often acting collectively on behalf of humans. In many of these scenarios, individually greedy strategies can diminish overall performance, exemplified by phenomena such as stop-and-go traffic congestion or network service disruptions due to competing interests. Thus, there is a growing need to develop decision-making strategies for autonomous agents that balance individual efficiency with group equitability.
Methods: We propose a straightforward approach for rewarding groups of autonomous agents within evolutionary and reinforcement learning frameworks based explicitly on the performance of the weakest member of the group. Rather than optimizing each agent's individual rewards independently, we align incentives by using a "weakest-link" metric, thereby encouraging collective strategies that support equitable outcomes.
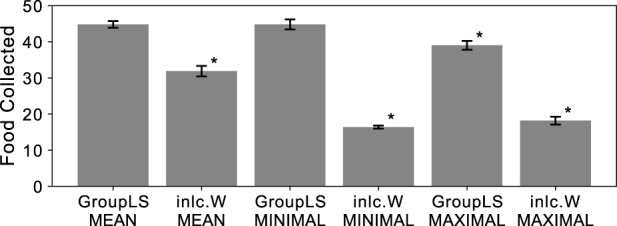
Results: Our results demonstrate that this weakest-member reward system effectively promotes equitable behavior among autonomous agents. Agents evolve or learn to balance collective benefit with individual performance, resulting in fairer outcomes for the entire group. Notably, the introduced approach improves overall efficiency, as equitably-minded agents collectively achieve greater stability and higher individual outcomes than agents pursuing purely selfish strategies.
Discussion: This methodology aligns closely with biological mechanisms observed in nature, specifically group-level selection and inclusive fitness theory. By tying the evolutionary and learning objectives to the group's weakest member, we mimic natural processes that favor cooperative and equitable behaviors. Our findings highlight the importance of incentive structures that consider the collective well-being to optimize both group fairness and individual agent success. Future research should explore how this reward framework generalizes across broader domains and more complex agent interactions.
期刊介绍:
Frontiers in Robotics and AI publishes rigorously peer-reviewed research covering all theory and applications of robotics, technology, and artificial intelligence, from biomedical to space robotics.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


