Strain energy equivalence-based gravity-induced deformation prediction and accuracy partitioning enhancement of a parallel machining module
IF 4.5
1区 工程技术
Q1 ENGINEERING, MECHANICAL
引用次数: 0
Abstract
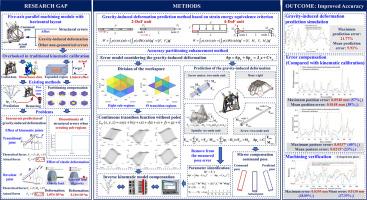
Structural errors, gravity-induced deformation and other non-geometrical errors simultaneously affect the accuracy of machining equipment. On the one hand, separating gravity-induced deformation from the total pose error is very difficult, which makes the identification of structural errors lacks reliable pose error data. On the other hand, the pose error caused by the other non-geometrical errors is often overlooked in calibration, and it will generate a random disturbance to the pose error caused by structural errors, which makes the error compensation effect worsen as the calibration region expands. In this article, a gravity-induced deformation prediction model based on strain energy equivalence criterion is proposed, which reduces the maximum and mean gravity-induced deformation prediction errors by 55.00 % and 65.32 % in simulation. On this basis, the error model of a five-axis parallel machining module considering gravity-induced deformation is established. Then, an accuracy partitioning enhancement method is proposed, in which the workspace is divided into eight sub-regions and 19 transition regions. A continuous transition function without poles is designed, which guarantees the continuity of structural errors among sub-regions without large fluctuations in transition regions. The pose error caused by structural errors is obtained by removing the predicted gravity-induced deformation from the measured total pose error. The structural errors in sub-regions and transition regions are obtained through the identification process and transition function, respectively, and are compensated into the inverse kinematic model separately. Then, the predicted gravity-induced deformation is compensated into command poses. After accuracy partitioning enhancement with the proposed method to consider gravity-induced deformation, the maximum/mean position error was reduced from 0.1266 mm/0.0238 mm to 0.0548 mm/0.0148 mm, and the maximum/mean posture error was reduced from 0.0897°/0.0280° to 0.0537°/0.0215° compared to the kinematic calibration method that does not apply the accuracy partitioning enhancement method. An S-shaped test piece was machined, and the maximum/mean error of the measuring points was reduced from 0.0817 mm/0.0253 mm to 0.0581 mm/0.0158 mm. The experimental results verify the effectiveness of the gravity-induced deformation prediction model and accuracy partitioning enhancement method. The proposed method can also be applied to other equipment with parallel kinematics.
基于应变能等效的重力变形预测及并联加工模块精度划分增强
结构误差、重力变形等非几何误差同时影响加工设备的精度。一方面,将重力引起的变形与总位姿误差分离是非常困难的,这使得结构误差的识别缺乏可靠的位姿误差数据。另一方面,其他非几何误差引起的位姿误差在标定中往往被忽略,并且会对结构误差引起的位姿误差产生随机扰动,使误差补偿效果随着标定区域的扩大而恶化。本文提出了一种基于应变能等效准则的重力变形预测模型,该模型使模拟中重力变形预测的最大误差和平均误差分别降低了55.00%和65.32%。在此基础上,建立了考虑重力变形的五轴并联加工模块误差模型。然后,提出了一种精度分区增强方法,该方法将工作空间划分为8个子区域和19个过渡区域。设计了一个无极点的连续过渡函数,保证了子区域间结构误差的连续性,且过渡区域内没有较大的波动。通过从测量的总位姿误差中去除预测的重力引起的变形,得到由结构误差引起的位姿误差。通过辨识过程和过渡函数分别得到子区域和过渡区域的结构误差,并分别补偿到运动学逆模型中。然后,将预测的重力引起的变形补偿到指令姿态中。与未采用精度划分增强方法的运动学标定方法相比,考虑重力变形的精度划分增强后,最大/平均位置误差从0.1266 mm/0.0238 mm减小到0.0548 mm/0.0148 mm,最大/平均姿态误差从0.0897°/0.0280°减小到0.0537°/0.0215°。对s形试件进行加工,测点的最大/平均误差由0.0817 mm/0.0253 mm减小到0.0581 mm/0.0158 mm。实验结果验证了重力变形预测模型和精度分区增强方法的有效性。该方法也适用于其他具有并联运动的设备。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Mechanism and Machine Theory
工程技术-工程:机械
CiteScore
9.90
自引率
23.10%
发文量
450
审稿时长
20 days
期刊介绍:
Mechanism and Machine Theory provides a medium of communication between engineers and scientists engaged in research and development within the fields of knowledge embraced by IFToMM, the International Federation for the Promotion of Mechanism and Machine Science, therefore affiliated with IFToMM as its official research journal.
The main topics are:
Design Theory and Methodology;
Haptics and Human-Machine-Interfaces;
Robotics, Mechatronics and Micro-Machines;
Mechanisms, Mechanical Transmissions and Machines;
Kinematics, Dynamics, and Control of Mechanical Systems;
Applications to Bioengineering and Molecular Chemistry
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


