Dynamic coverage path planning method for UAV formations in multi-region aerial tasks
IF 5.8
1区 工程技术
Q1 ENGINEERING, AEROSPACE
引用次数: 0
Abstract
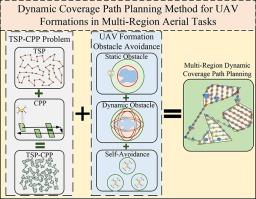
Planning coverage paths for multiple discrete regions is a prerequisite for Unmanned Aerial Vehicle (UAV) formations to perform continuous coverage tasks. However, precisely solving for the globally optimal path is computationally challenging, and maintaining formation shape under the interference of static and dynamic obstacles is difficult. Traditional path planning methods often perform poorly in large-scale, multi-region coverage tasks due to getting trapped in local optima or low computational efficiency, making it challenging to maintain formation shape while achieving swarm obstacle avoidance. This study proposes a novel dynamic multi-region coverage path planning method to enhance the task efficiency and safety of UAV formations in complex environments. First, a heuristic optimization algorithm, PGS2, was developed, incorporating three optimized mechanisms to significantly enhance global search capabilities. In nine scenarios with varying numbers of access points and discrete regions, PGS2 reduced average path costs by 56.7% and 1.35% compared to six baseline algorithms, demonstrating superior optimization performance and stability. Second, the Orthogonal Artificial Potential Field (Orthogonal APF) path planning algorithm and a gradient-mapping-based swarm self-avoidance method were proposed, achieving dynamic path planning while maintaining formation shape through virtual target point design. Orthogonal APF achieved a 100% target arrival rate in nine multi-obstacle scenarios, with path deviation reduced by an average of 31.93% compared to four other algorithms, validating its effectiveness and unique path recovery capability. In a simulation environment with three regions and multiple obstacles, the UAV formation could avoid static obstacles in approximately 5 seconds and dynamic obstacles in about 2 seconds, while the virtual target point mechanism ensured formation recovery within approximately 3 seconds post-avoidance and supported formation reconfiguration for varying UAV counts. This study provides an innovative path planning method for efficient and safe UAV formation operations in multi-region, complex environments, with comparisons to traditional methods demonstrating its significant advantages in path optimization, obstacle avoidance, and task continuity.
多区域空中任务中无人机编队动态覆盖路径规划方法
规划多离散区域的覆盖路径是无人机编队执行连续覆盖任务的前提条件。然而,精确求解全局最优路径在计算上具有挑战性,并且在静态和动态障碍物的干扰下难以保持地层形状。在大规模、多区域覆盖任务中,传统的路径规划方法往往受困于局部最优或计算效率较低,难以在保持队形的同时实现群体避障。为了提高无人机编队在复杂环境下的任务效率和安全性,提出了一种新的动态多区域覆盖路径规划方法。首先,开发了一种启发式优化算法PGS2,该算法结合了三种优化机制,显著增强了全局搜索能力。在9个具有不同接入点数量和离散区域的场景中,与6种基线算法相比,PGS2将平均路径成本分别降低了56.7%和1.35%,显示出卓越的优化性能和稳定性。其次,提出正交人工势场(Orthogonal Artificial Potential Field,正交人工势场)路径规划算法和基于梯度映射的群体自回避算法,通过虚拟目标点设计实现动态路径规划,同时保持编队形状;正交APF算法在9个多障碍物场景下均达到100%的目标到达率,路径偏差比其他4种算法平均减少31.93%,验证了其有效性和独特的路径恢复能力。在三区多障碍物仿真环境下,无人机编队可在约5秒内避开静态障碍物,在约2秒内避开动态障碍物,虚拟目标点机制可确保编队在避障后约3秒内恢复,并支持不同数量无人机的编队重构。本研究为多区域、复杂环境下高效、安全的无人机编队作战提供了一种创新的路径规划方法,与传统方法相比,在路径优化、避障、任务连续性等方面具有显著优势。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Aerospace Science and Technology
工程技术-工程:宇航
CiteScore
10.30
自引率
28.60%
发文量
654
审稿时长
54 days
期刊介绍:
Aerospace Science and Technology publishes articles of outstanding scientific quality. Each article is reviewed by two referees. The journal welcomes papers from a wide range of countries. This journal publishes original papers, review articles and short communications related to all fields of aerospace research, fundamental and applied, potential applications of which are clearly related to:
• The design and the manufacture of aircraft, helicopters, missiles, launchers and satellites
• The control of their environment
• The study of various systems they are involved in, as supports or as targets.
Authors are invited to submit papers on new advances in the following topics to aerospace applications:
• Fluid dynamics
• Energetics and propulsion
• Materials and structures
• Flight mechanics
• Navigation, guidance and control
• Acoustics
• Optics
• Electromagnetism and radar
• Signal and image processing
• Information processing
• Data fusion
• Decision aid
• Human behaviour
• Robotics and intelligent systems
• Complex system engineering.
Etc.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


