APS-NeuS: Adaptive planar and skip-sampling for 3D object surface reconstruction in high-specular scenes
IF 4.2
3区 计算机科学
Q2 COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE
引用次数: 0
Abstract
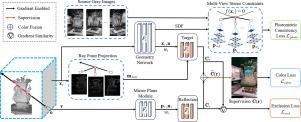
High-fidelity 3D object surface reconstruction remains challenging in real-world scenes with strong specular reflections, where multi-view consistency is disrupted by reflection artifacts. To address this, we propose APS-NeuS, an implicit neural rendering framework designed to robustly separate target objects from reflective interference. Specifically, we establish a pixel-wise auxiliary mirror plane to differentiate reflections from target objects and incorporate a Laplacian gradient to better recover their edges and fine structures. Additionally, we introduce a skip-sampling strategy to reduce the impact of reflective interference, further enhancing multi-view consistency and surface fidelity. Finally, we introduce an exclusion loss to help the model more accurately separate the target objects from the reflective parts during initialization by comparing the gradient differences. Extensive experiments on synthetic and real-world datasets show that APS-NeuS achieves superior reconstruction quality under high-specular reflection conditions, demonstrating its practical applicability to complex environments. Code is available at https://github.com/ujsjl/APS-NeuS.
aps - news:用于高镜面场景中3D物体表面重建的自适应平面和跳过采样
在具有强烈镜面反射的真实场景中,高保真3D物体表面重建仍然具有挑战性,其中多视图一致性被反射伪影破坏。为了解决这个问题,我们提出了aps - news,这是一个隐式神经渲染框架,旨在将目标物体从反射干扰中健壮地分离出来。具体来说,我们建立了一个逐像素的辅助镜面来区分来自目标物体的反射,并结合拉普拉斯梯度来更好地恢复其边缘和精细结构。此外,我们引入了跳过采样策略,以减少反射干扰的影响,进一步提高多视图一致性和表面保真度。最后,我们引入了排除损失,通过比较梯度差,帮助模型在初始化过程中更准确地分离目标物体和反射部分。在合成数据集和真实数据集上的大量实验表明,aps - news在高镜面反射条件下获得了优异的重建质量,证明了其在复杂环境中的实际适用性。代码可从https://github.com/ujsjl/APS-NeuS获得。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Image and Vision Computing
工程技术-工程:电子与电气
CiteScore
8.50
自引率
8.50%
发文量
143
审稿时长
7.8 months
期刊介绍:
Image and Vision Computing has as a primary aim the provision of an effective medium of interchange for the results of high quality theoretical and applied research fundamental to all aspects of image interpretation and computer vision. The journal publishes work that proposes new image interpretation and computer vision methodology or addresses the application of such methods to real world scenes. It seeks to strengthen a deeper understanding in the discipline by encouraging the quantitative comparison and performance evaluation of the proposed methodology. The coverage includes: image interpretation, scene modelling, object recognition and tracking, shape analysis, monitoring and surveillance, active vision and robotic systems, SLAM, biologically-inspired computer vision, motion analysis, stereo vision, document image understanding, character and handwritten text recognition, face and gesture recognition, biometrics, vision-based human-computer interaction, human activity and behavior understanding, data fusion from multiple sensor inputs, image databases.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


