{"title":"Hybrid disturbance observer and fuzzy logic controller for a new aerial manipulation system.","authors":"Alaa Khalifa, Shaaban M Shaaban, Ahmed Khalifa","doi":"10.3389/frobt.2025.1528415","DOIUrl":null,"url":null,"abstract":"<p><p>Aerial manipulation systems are highly attractive for various applications due to their distinctive features. However, the systems discussed in the literature are constrained by either a restricted number of end-effector degrees of freedom (DOFs) or low payload capability. In our previous research, we mounted a manipulator with a gripper on the underside of a quadrotor to enhance environmental interaction. This paper explores a quadrotor equipped with a 2-DOF manipulator featuring a distinctive topology that allows the end-effector to follow a specified 6-DOF trajectory with the least number of actuators required. An overview of the proposed manipulation system, along with its kinematic and dynamic analysis, is presented. Nevertheless, controlling this system presents significant challenges because of its considerable couplings, nonlinearities, and external disturbances. This paper employs a Disturbance Observer (DOb)-based linearization for an aerial manipulation robot. The DOb-based inner loop is responsible for estimating and compensating nonlinearities and disturbances, which simplifies the control problem into a more straightforward linear control algorithm. Subsequently, a fuzzy logic controller is incorporated into the outer loop to achieve the desired control objectives and closed-loop performance while minimizing computational load. Stability analysis of the proposed controller is introduced. Finally, the system is simulated using MATLAB/SIMULINK, and the results demonstrate tracking accuracy during 6-DOF maneuvers under many kinds of disturbances, with low computational load. The system maintains stability during payload exchanges while respecting all actuator constraints (rotor thrust less than 6 N, joint torques less than 0.7 and 0.4 N.m, respectively). These results demonstrate the effectiveness of the proposed control approach. Also, they show that the proposed controller outperforms the DOb-PD controller's response.</p>","PeriodicalId":47597,"journal":{"name":"Frontiers in Robotics and AI","volume":"12 ","pages":"1528415"},"PeriodicalIF":3.0000,"publicationDate":"2025-07-07","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12277165/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Robotics and AI","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.3389/frobt.2025.1528415","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q2","JCRName":"ROBOTICS","Score":null,"Total":0}
引用次数: 0
Abstract
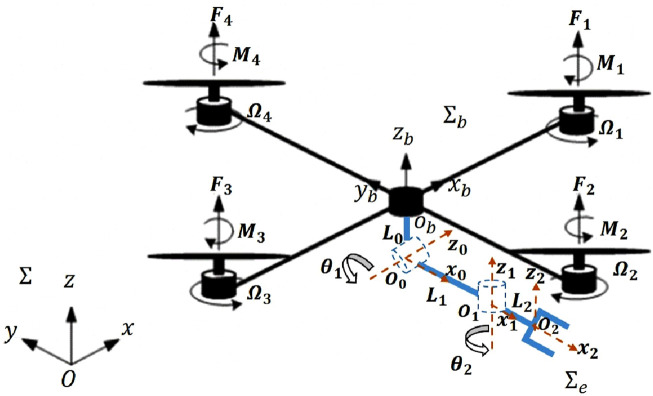
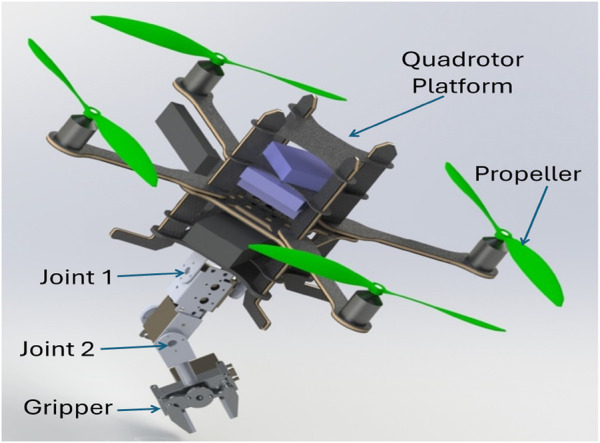
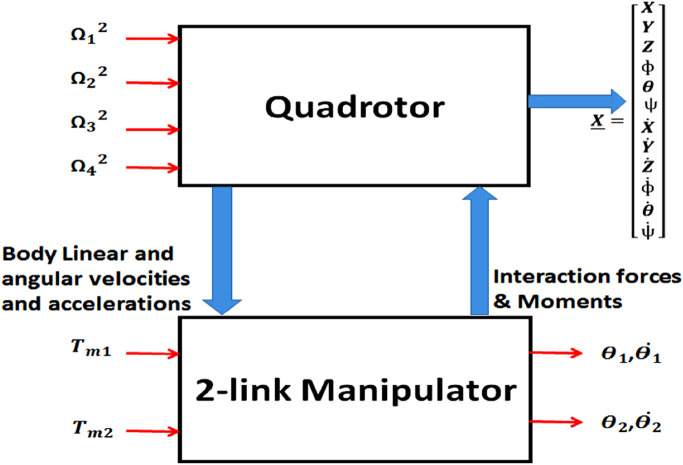
Aerial manipulation systems are highly attractive for various applications due to their distinctive features. However, the systems discussed in the literature are constrained by either a restricted number of end-effector degrees of freedom (DOFs) or low payload capability. In our previous research, we mounted a manipulator with a gripper on the underside of a quadrotor to enhance environmental interaction. This paper explores a quadrotor equipped with a 2-DOF manipulator featuring a distinctive topology that allows the end-effector to follow a specified 6-DOF trajectory with the least number of actuators required. An overview of the proposed manipulation system, along with its kinematic and dynamic analysis, is presented. Nevertheless, controlling this system presents significant challenges because of its considerable couplings, nonlinearities, and external disturbances. This paper employs a Disturbance Observer (DOb)-based linearization for an aerial manipulation robot. The DOb-based inner loop is responsible for estimating and compensating nonlinearities and disturbances, which simplifies the control problem into a more straightforward linear control algorithm. Subsequently, a fuzzy logic controller is incorporated into the outer loop to achieve the desired control objectives and closed-loop performance while minimizing computational load. Stability analysis of the proposed controller is introduced. Finally, the system is simulated using MATLAB/SIMULINK, and the results demonstrate tracking accuracy during 6-DOF maneuvers under many kinds of disturbances, with low computational load. The system maintains stability during payload exchanges while respecting all actuator constraints (rotor thrust less than 6 N, joint torques less than 0.7 and 0.4 N.m, respectively). These results demonstrate the effectiveness of the proposed control approach. Also, they show that the proposed controller outperforms the DOb-PD controller's response.
期刊介绍:
Frontiers in Robotics and AI publishes rigorously peer-reviewed research covering all theory and applications of robotics, technology, and artificial intelligence, from biomedical to space robotics.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


