Combining grasping and rotation with a spherical robot hand mechanism
IF 23.9
1区 计算机科学
Q1 COMPUTER SCIENCE, ARTIFICIAL INTELLIGENCE
引用次数: 0
Abstract
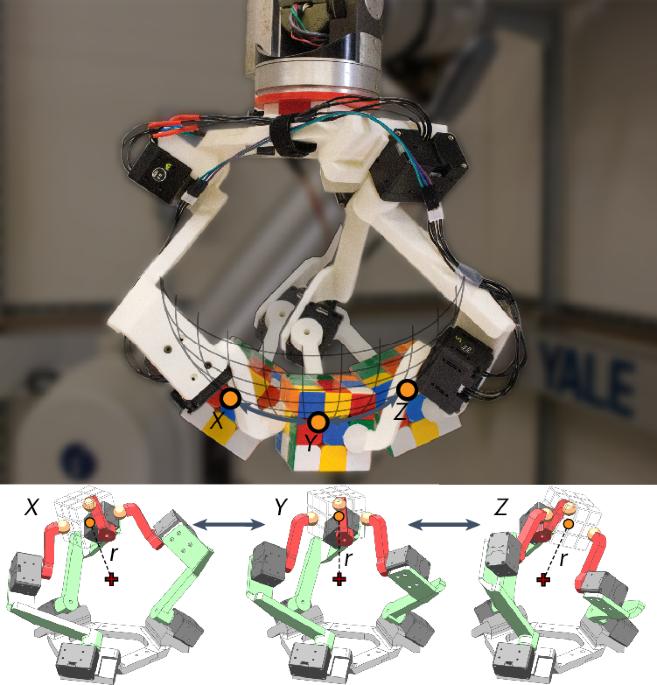
Object reorientation is a key functionality in dexterous manipulation tasks, such as turning a doorknob. This is usually done on robot arms with a simple gripper and a three-degrees-of-freedom wrist. However, wrists are mechanically complex, and the wrist axes are often far away from the grasped object, resulting in coupled translations that need to be compensated with awkward whole-arm motions. We present a robot hand mechanism based on a spherical parallel architecture that can both grasp and rotate a wide range of objects in all three axes, combining much of the function of traditional wrists and grippers. The hand mechanism allows for pure spherical rotations of the grasped object about a known fixed point close to the object, thereby avoiding parasitic translations and inefficient arm motions. This point also stays fixed with respect to the hand, and is independent of the object shape, pose or initial grasp. We detail the spherical parallel design and workspace model of the wrist-like Sphinx hand, validate its performance for lower-degrees-of-freedom robot arms without traditional wrists and show that it can accurately rotate the grasped objects over large angles with basic open-loop control. Developing robot hands for unstructured human environments is a major challenge. A robotic hand that combines grasping and wrist-like rotation in one mechanism for more efficient and versatile object manipulation is presented.

结合抓握和旋转的球形机械手机构
物体重定向是灵巧操作任务中的一个关键功能,比如转动门把手。这通常是用一个简单的抓手和一个三自由度的手腕在机器人手臂上完成的。然而,手腕在机械上是复杂的,手腕轴往往远离被抓物体,导致耦合平移,需要用尴尬的全臂运动来补偿。我们提出了一种基于球面并行结构的机器人手机构,它可以在所有三个轴上抓取和旋转各种物体,结合了传统手腕和抓取器的许多功能。手机构允许抓取对象的纯球面旋转,围绕一个已知的固定点接近对象,从而避免寄生平移和低效的手臂运动。这个点相对于手也保持固定,并且独立于物体的形状、姿势或最初的抓取。详细介绍了仿手腕Sphinx手的球面平行设计和工作空间模型,验证了其在无传统手腕的低自由度机械臂上的性能,并表明它可以在基本开环控制下精确地实现抓取物体的大角度旋转。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

Nature Machine Intelligence
Multiple-
CiteScore
36.90
自引率
2.10%
发文量
127
期刊介绍:
Nature Machine Intelligence is a distinguished publication that presents original research and reviews on various topics in machine learning, robotics, and AI. Our focus extends beyond these fields, exploring their profound impact on other scientific disciplines, as well as societal and industrial aspects. We recognize limitless possibilities wherein machine intelligence can augment human capabilities and knowledge in domains like scientific exploration, healthcare, medical diagnostics, and the creation of safe and sustainable cities, transportation, and agriculture. Simultaneously, we acknowledge the emergence of ethical, social, and legal concerns due to the rapid pace of advancements.
To foster interdisciplinary discussions on these far-reaching implications, Nature Machine Intelligence serves as a platform for dialogue facilitated through Comments, News Features, News & Views articles, and Correspondence. Our goal is to encourage a comprehensive examination of these subjects.
Similar to all Nature-branded journals, Nature Machine Intelligence operates under the guidance of a team of skilled editors. We adhere to a fair and rigorous peer-review process, ensuring high standards of copy-editing and production, swift publication, and editorial independence.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


