{"title":"Multi-Robot Autonomous Exploration in Unknown Environments With Dynamic Obstacles","authors":"Jing Chu, Xiaodie Lv, Qi Yue, Yong Huang, Xueke Huangfu","doi":"10.1049/csy2.70019","DOIUrl":null,"url":null,"abstract":"<p>Exploring unknown environments by multiple robots is promising but challenging. The challenges are posed not only by the coordination among multiple robots to improve exploration efficiency, but also by dynamic obstacles that suddenly appear on planned paths. To address those two challenges, this paper proposes a two-layer architecture where the high-level layer generates target locations for each robot to explore the unknown environment, while the low-level layer plans paths in the dynamic environment for each robot. Specifically, in the high-level design, a novel auction algorithm is proposed, which considers both the distance of robots to target locations and the number of frontiers within the clustering domain of target locations. This approach enables robots to explore different target locations while reducing redundant exploration compared to traditional exploration algorithms. In the low-level design, a neural network-based Q-learning algorithm is employed for path planning to achieve dynamic obstacle avoidance. Robots can dynamically adjust their actions through interaction with the external environment, thus avoid obstacles and reach the target position. To validate our methods, a series of simulation experiments are conducted. The experimental results demonstrate that robots can not only efficiently accomplish exploration tasks in unknown environments, but also achieve effective obstacle avoidance when faced with suddenly appearing dynamic obstacles.</p>","PeriodicalId":34110,"journal":{"name":"IET Cybersystems and Robotics","volume":"7 1","pages":""},"PeriodicalIF":1.2000,"publicationDate":"2025-07-18","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://onlinelibrary.wiley.com/doi/epdf/10.1049/csy2.70019","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"IET Cybersystems and Robotics","FirstCategoryId":"1085","ListUrlMain":"https://ietresearch.onlinelibrary.wiley.com/doi/10.1049/csy2.70019","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"","PubModel":"","JCR":"Q3","JCRName":"AUTOMATION & CONTROL SYSTEMS","Score":null,"Total":0}
引用次数: 0
Abstract
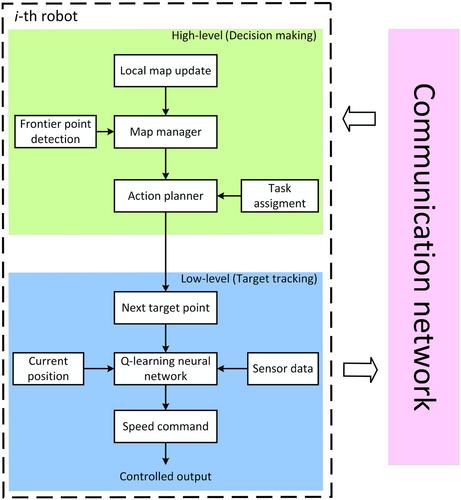
Exploring unknown environments by multiple robots is promising but challenging. The challenges are posed not only by the coordination among multiple robots to improve exploration efficiency, but also by dynamic obstacles that suddenly appear on planned paths. To address those two challenges, this paper proposes a two-layer architecture where the high-level layer generates target locations for each robot to explore the unknown environment, while the low-level layer plans paths in the dynamic environment for each robot. Specifically, in the high-level design, a novel auction algorithm is proposed, which considers both the distance of robots to target locations and the number of frontiers within the clustering domain of target locations. This approach enables robots to explore different target locations while reducing redundant exploration compared to traditional exploration algorithms. In the low-level design, a neural network-based Q-learning algorithm is employed for path planning to achieve dynamic obstacle avoidance. Robots can dynamically adjust their actions through interaction with the external environment, thus avoid obstacles and reach the target position. To validate our methods, a series of simulation experiments are conducted. The experimental results demonstrate that robots can not only efficiently accomplish exploration tasks in unknown environments, but also achieve effective obstacle avoidance when faced with suddenly appearing dynamic obstacles.




 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


