Benders decomposition for traveling salesman problem with drone: A space-time-state network perspective
IF 7.6
1区 工程技术
Q1 TRANSPORTATION SCIENCE & TECHNOLOGY
Transportation Research Part C-Emerging Technologies
Pub Date : 2025-07-14
DOI:10.1016/j.trc.2025.105255
引用次数: 0
Abstract
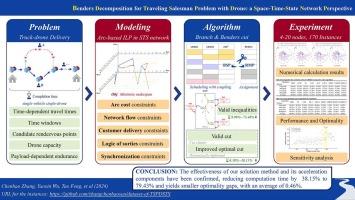
As technology advances, the integration of diverse transportation modes is accelerating, with truck-drone collaboration emerging as a promising solution to urban last-mile delivery challenges. While prior research has extensively covered spatial synchronization in customer service networks, studies on temporal synchronization and time-dependence in real transportation networks remains limited, as does the consideration of candidate rendezvous points. To address this gap, we propose a novel modeling approach to the Traveling Salesman Problem with Drone, utilizing a Space-Time-State network framework, termed TSPD-STS. An arc-based integer linear programming (ILP) model is presented for single-truck single-drone delivery, incorporating time-dependent travel time influenced by varying speeds, candidate rendezvous, drone capacity, payload-dependent endurance and time windows. We solve the problem by a branch-and-Benders-cut approach based on generalized Benders decomposition, dividing it into an assignment problem (i.e., the master problem) and a coupled scheduling problem (i.e., the subproblem). The master problem is solved only once, while the subproblem dynamically provides cuts along the branching. To improve computational efficiency, we design five classes valid inequalities to strengthen the relaxed master problem, and propose a dynamically tightened optimal cut and a novel valid cut which, unlike traditional no-good cut, can handle clusters of variables in a single step. Extensive computational experiments on 170 instances with 4 to 20 space nodes, tested under four time-dependent patterns and compared against ten algorithms using branch-and-bound and operation-based dynamic programming as baselines, demonstrate the superior performance of the proposed method. Our approach reduces computation time by 38.15% to 79.43% and yields smaller optimality gaps, with an average of 0.46%. Sensitivity analyses provide practical insights for logistics planning and strategic decision-making.
无人机旅行商问题的弯曲分解:一个时空状态网络的视角
随着技术的进步,各种运输方式的整合正在加速,卡车-无人机合作正在成为解决城市最后一英里交付挑战的有希望的解决方案。虽然先前的研究广泛地涵盖了客户服务网络的空间同步,但对真实交通网络的时间同步和时间依赖性的研究仍然有限,对候选会合点的考虑也是如此。为了解决这一差距,我们提出了一种新的无人机旅行商问题建模方法,利用时空状态网络框架,称为TSPD-STS。提出了一种基于弧的单卡车单无人机配送的整数线性规划(ILP)模型,该模型考虑了不同速度、候选地点、无人机容量、有效载荷相关续航时间和时间窗口对行程时间的影响。采用基于广义Benders分解的branch-and-Benders-cut方法求解该问题,将其划分为分配问题(即主问题)和耦合调度问题(即子问题)。主问题只解决一次,而子问题则沿着分支动态地提供切割。为了提高计算效率,我们设计了5类有效不等式来强化松弛的主问题,并提出了一种动态收紧的最优割法和一种新的有效割法,它与传统的无优割法不同,可以在一步内处理变量簇。在170个具有4到20个空间节点的实例上进行了大量的计算实验,在四种时间相关模式下进行了测试,并与以分支定界和基于操作的动态规划为基准的十种算法进行了比较,证明了所提出方法的优越性能。我们的方法将计算时间减少了38.15%至79.43%,并且产生了更小的最优性差距,平均为0.46%。敏感性分析为物流规划和战略决策提供了实用的见解。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊

CiteScore
15.80
自引率
12.00%
发文量
332
审稿时长
64 days
期刊介绍:
Transportation Research: Part C (TR_C) is dedicated to showcasing high-quality, scholarly research that delves into the development, applications, and implications of transportation systems and emerging technologies. Our focus lies not solely on individual technologies, but rather on their broader implications for the planning, design, operation, control, maintenance, and rehabilitation of transportation systems, services, and components. In essence, the intellectual core of the journal revolves around the transportation aspect rather than the technology itself. We actively encourage the integration of quantitative methods from diverse fields such as operations research, control systems, complex networks, computer science, and artificial intelligence. Join us in exploring the intersection of transportation systems and emerging technologies to drive innovation and progress in the field.
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


