{"title":"Stability and trajectory tracking of four- wheel steering trackless auxiliary transport robot via PID control.","authors":"Mingrui Hao, Yueqi Bi, Jie Ren, Lisen Ma, Jiaran Li, Sihai Zhao, Miao Wu","doi":"10.3389/frobt.2025.1617376","DOIUrl":null,"url":null,"abstract":"<p><p>In the complex working environment of underground coal mines, narrow road conditions and deviation in the driving path of autonomous trackless auxiliary transport robots can easily lead to collisions with walls or obstacles. This issue can be effectively solved by a four-wheel steering system, as it can reduce the turning radius of the robot at low speeds and improve its maneuverability at high speeds. Thus, a linear two-degree-of-freedom dynamics model of trackless auxiliary transport robot is established and the steady-state lateral critical speed of 16.6 km/h is obtained. Then a four wheel steering PID trajectory tracking strategy were constructed. Experiments on different steering modes at low and high speeds, which include stepped steering angles and circular path tracking, for the front-wheel steering mode and four-wheel steering mode of the robot are conducted under loaded conditions. The experimental results show that in the low-speed 10 km/h step steering angle input test, compared with the front-wheel steering mode, the turning radius of the robot is reduced by 32.2%, which ensures it easier to pass through narrow tunnels. Under the conditions of a 40 km/h high-speed step steering angle input test, the handling stability has been improved. The results of the circular trajectory tracking test show that at low speeds (10 km/h), the average radius error of the robot is 0.3%, while the radius error of the front-wheel steering robot reaches 2.12%. At high speeds (40 km/h), the average radius error is 2.4%, while the radius error of front-wheel steering mode is 8.74%. The robot maintains good track tracking ability, reducing the risk of collision with tunnel walls and improving robot operation safety.</p>","PeriodicalId":47597,"journal":{"name":"Frontiers in Robotics and AI","volume":"12 ","pages":"1617376"},"PeriodicalIF":3.0000,"publicationDate":"2025-06-25","publicationTypes":"Journal Article","fieldsOfStudy":null,"isOpenAccess":false,"openAccessPdf":"https://www.ncbi.nlm.nih.gov/pmc/articles/PMC12237676/pdf/","citationCount":"0","resultStr":null,"platform":"Semanticscholar","paperid":null,"PeriodicalName":"Frontiers in Robotics and AI","FirstCategoryId":"1085","ListUrlMain":"https://doi.org/10.3389/frobt.2025.1617376","RegionNum":0,"RegionCategory":null,"ArticlePicture":[],"TitleCN":null,"AbstractTextCN":null,"PMCID":null,"EPubDate":"2025/1/1 0:00:00","PubModel":"eCollection","JCR":"Q2","JCRName":"ROBOTICS","Score":null,"Total":0}
引用次数: 0
Abstract
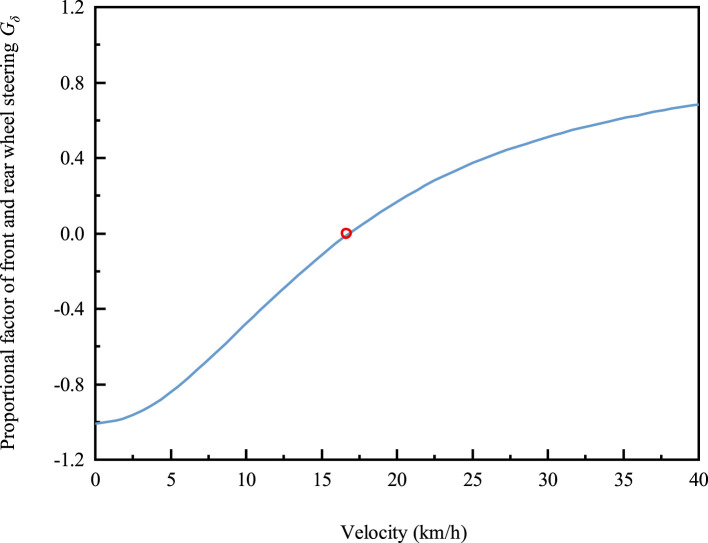
In the complex working environment of underground coal mines, narrow road conditions and deviation in the driving path of autonomous trackless auxiliary transport robots can easily lead to collisions with walls or obstacles. This issue can be effectively solved by a four-wheel steering system, as it can reduce the turning radius of the robot at low speeds and improve its maneuverability at high speeds. Thus, a linear two-degree-of-freedom dynamics model of trackless auxiliary transport robot is established and the steady-state lateral critical speed of 16.6 km/h is obtained. Then a four wheel steering PID trajectory tracking strategy were constructed. Experiments on different steering modes at low and high speeds, which include stepped steering angles and circular path tracking, for the front-wheel steering mode and four-wheel steering mode of the robot are conducted under loaded conditions. The experimental results show that in the low-speed 10 km/h step steering angle input test, compared with the front-wheel steering mode, the turning radius of the robot is reduced by 32.2%, which ensures it easier to pass through narrow tunnels. Under the conditions of a 40 km/h high-speed step steering angle input test, the handling stability has been improved. The results of the circular trajectory tracking test show that at low speeds (10 km/h), the average radius error of the robot is 0.3%, while the radius error of the front-wheel steering robot reaches 2.12%. At high speeds (40 km/h), the average radius error is 2.4%, while the radius error of front-wheel steering mode is 8.74%. The robot maintains good track tracking ability, reducing the risk of collision with tunnel walls and improving robot operation safety.
期刊介绍:
Frontiers in Robotics and AI publishes rigorously peer-reviewed research covering all theory and applications of robotics, technology, and artificial intelligence, from biomedical to space robotics.

 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


