Development and evaluation of a head-controlled wheelchair system for users with severe motor impairments
IF 1.9
Q2 MULTIDISCIPLINARY SCIENCES
引用次数: 0
Abstract
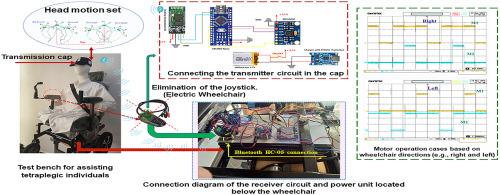
This paper presents an innovative and accessible hands-free wheelchair control system designed for individuals with severe motor impairments, particularly tetraplegic users. Unlike traditional joystick-based systems, which are often unsuitable for users with quadriplegia, our system relies on intuitive head-motion detection to enhance autonomy and ease of use. The system consists of a wearable motion-sensing cap equipped with an MPU-6050 sensor which is a 6-axis Inertial Measurement Unit (IMU) to capture head gestures, processed by an ATmega328 microcontroller (a low-power 8-bit AVR microcontroller widely used in embedded systems) integrated on an Arduino Nano development board. Wireless commands are transmitted via a Bluetooth module (HC-05) to the wheelchair’s control unit consisting of an Arduino Uno microcontroller and BTS7960 motor drivers — high-power H-bridge modules that enable bidirectional control of DC motors. The operational flow, including signal processing, gesture interpretation, and wireless transmission, is structured following a detailed flowchart-based design. Experimental results indicate a high response rate and directional accuracy of over 90 % using a 45° head tilt. The optimal safe speed was determined to be 1.87 km/h with a Pulse Width Modulation (PWM) value of 180. Rather than designing a mechanical chassis from scratch, a commercially available electric wheelchair was modified by removing its joystick interface, allowing seamless integration of the head-controlled system. These findings validate the system’s usability and precision under real-world conditions. By eliminating manual input and emphasizing simplicity, the proposed solution holds strong potential as a scalable and low-cost mobility aid, especially in low-resource environments.
重度运动障碍使用者头部控制轮椅系统的开发与评估
本文介绍了一种创新的、易于使用的免提轮椅控制系统,专为严重运动障碍的个人设计,特别是四肢瘫痪的用户。传统的基于操纵杆的系统通常不适合四肢瘫痪的用户,而我们的系统依赖于直观的头部运动检测来增强自主性和易用性。该系统包括一个可穿戴式运动传感帽,配有MPU-6050传感器,该传感器是一个6轴惯性测量单元(IMU),用于捕获头部手势,由集成在Arduino Nano开发板上的ATmega328微控制器(广泛用于嵌入式系统的低功耗8位AVR微控制器)处理。无线指令通过蓝牙模块(HC-05)传输到轮椅的控制单元,该控制单元由Arduino Uno微控制器和BTS7960电机驱动器组成——大功率h桥模块,可以双向控制直流电机。操作流程,包括信号处理、手势解释和无线传输,是按照详细的流程图设计的。实验结果表明,使用45°头部倾斜时,响应率高,方向精度超过90%。确定最佳安全车速为1.87 km/h,脉宽调制(PWM)值为180。与从零开始设计机械底盘不同,市售的电动轮椅通过移除其操纵杆接口进行了修改,从而实现了头部控制系统的无缝集成。这些结果验证了该系统在实际条件下的可用性和精度。通过消除人工输入和强调简单性,所提出的解决方案具有作为可扩展和低成本移动辅助工具的强大潜力,特别是在资源匮乏的环境中。
本文章由计算机程序翻译,如有差异,请以英文原文为准。
求助全文
约1分钟内获得全文
求助全文
来源期刊
MethodsX
Health Professions-Medical Laboratory Technology
CiteScore
3.60
自引率
5.30%
发文量
314
审稿时长
7 weeks
期刊介绍:
 求助内容:
求助内容: 应助结果提醒方式:
应助结果提醒方式:


